Nastavení parametrů
Záložka Parameters¶
V záložce Parameters je dostupné nastavení veškerých parametrů servozesilovače TGZ. Kromě tohoto podrobného nastavení je zde možné najít i detailní informace o připojeném servozesilovači (typ, výrobní číslo, atd.).
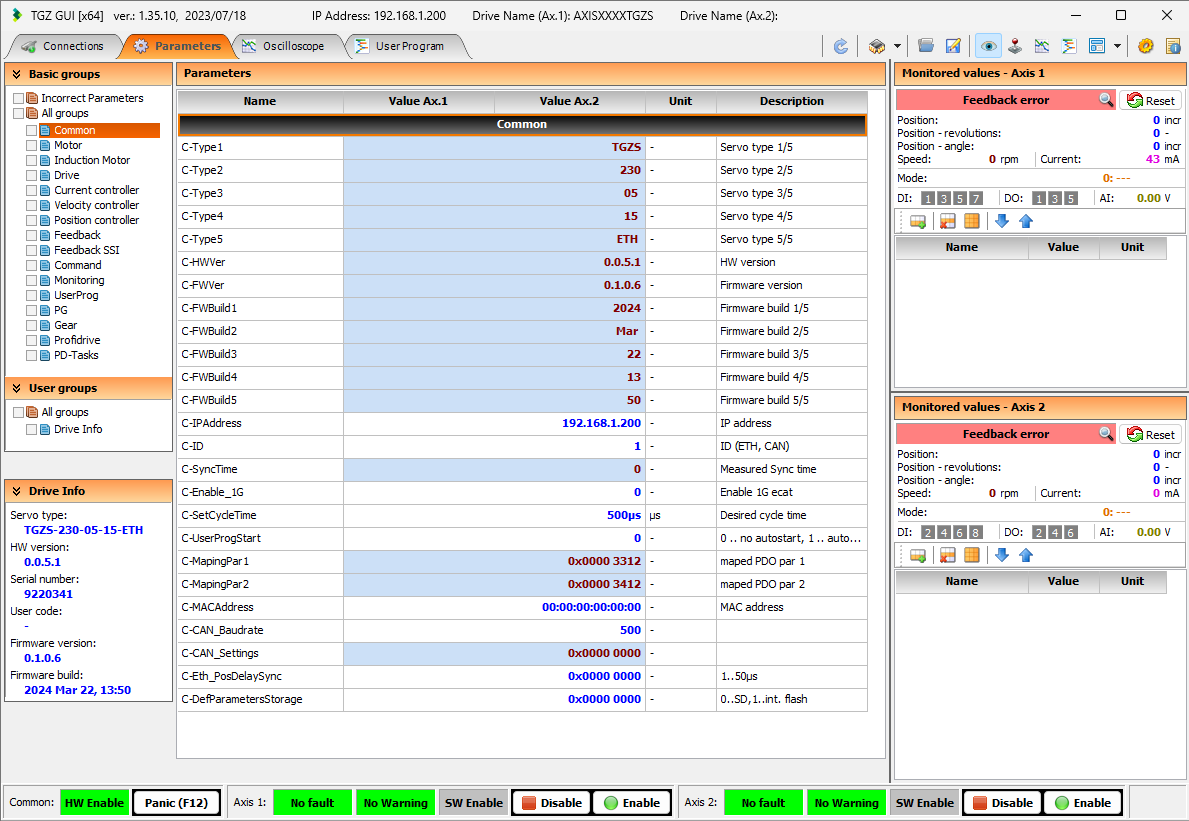
Otevřené okno se dále skládá z několika podoken:
- BASIC GROUPS - seznam skupin parametrů (v jednotlivých skupinách je možné nalézt a nastavit veškeré parametry servozesilovače).
- USER GROUPS - uživatelské skupiny (umožňují nastavení zobrazování vybraných skupin parametrů).
- DRIVE INFO - zobrazí informace o daném servozesilovači (typ, sériové číslo, verze HW, verze firmware, atd.).
- PARAMETERS - zobrazení a editování parametrů aktivní skupiny.
- MONITORED VALUES - AXIS 1 - zobrazuje základní informace o stavu (poloha, rychlost, proud atd.) osy 1 servozesilovače TGZ, zobrazí kód případné chyby a umožňuje její reset.
- MONITORED VALUES - AXIS 2 - zobrazuje základní informace o stavu (poloha, rychlost, proud atd.) osy 2 servozesilovače TGZ, zobrazí kód případné chyby a umožňuje její reset.
V dolní části okna se pak nachází informativní stavový řádek s několika funkčními tlačítky:
-
COMMON

-
informace o stavu HW ENABLE
-
AXIS 1

-
- zobrazení informací o stavu osy 1 (chyba, varovné hlášení SW Enable)
- funkční tlačítko Enable umožňuje zapnutí SW ENABLE u osy 1
- funkční tlačítko Disable umožňuje vypnutí SW ENABLE u osy 1
-
AXIS 2

-
- zobrazení informací o stavu osy 2 (chyba, varovné hlášení SW Enable)
- funkční tlačítko Enable umožňuje zapnutí SW ENABLE u osy 2
- funkční tlačítko Disable umožňuje vypnutí SW ENABLE u osy 2
Základní parametry TGZ v TGZ GUI¶
| Name | Axis | Basic Group | Index (ETH) | Group Index |
Item Index |
Access | Unit | Size | Popis [CZ] |
| C-Type1 | Common | 0x2000 | 0 | 0 | read-only | chars | 32 bits | Typové označení servozesilovače 1/5 | |
| C-Type2 | Common | 0x2001 | 0 | 1 | read-only | chars | 32 bits | Typové označení servozesilovače 2/5 | |
| C-Type3 | Common | 0x2002 | 0 | 2 | read-only | chars | 32 bits | Typové označení servozesilovače 3/5 | |
| C-Type4 | Common | 0x2003 | 0 | 3 | read-only | chars | 32 bits | Typové označení servozesilovače 4/5 | |
| C-Type5 | Common | 0x2004 | 0 | 4 | read-only | chars | 32 bits | Typové označení servozesilovače 5/5 | |
| C-HWVer | Common | 0x2005 | 0 | 5 | read-only | chars | 32 bits | Verze HW | |
| C-FWVer | Common | 0x2006 | 0 | 6 | read-only | chars | 32 bits | Verze firmware | |
| C-FWBuild1 | Common | 0x2007 | 0 | 7 | read-only | chars | 32 bits | Datum a cas vytvoreni firmware 1/5 | |
| C-FWBuild2 | Common | 0x2008 | 0 | 8 | read-only | chars | 32 bits | Datum a cas vytvoreni firmware 2/5 | |
| C-FWBuild3 | Common | 0x2009 | 0 | 9 | read-only | chars | 32 bits | Datum a cas vytvoreni firmware 3/5 | |
| C-FWBuild4 | Common | 0x200A | 0 | 10 | read-only | chars | 32 bits | Datum a cas vytvoreni firmware 4/5 | |
| C-FWBuild5 | Common | 0x200B | 0 | 11 | read-only | chars | 32 bits | Datum a cas vytvoreni firmware 5/5 | |
| C-IPAddress | Common | 0x200C | 0 | 12 | read-write | - | 32 bits | IP adresa servisního UDP kanálu X11 | |
| C-ID | Common | 0x200D | 0 | 13 | read-write | - | 32 bits | ID pro využití na sběrnici | |
| C-SyncTime | Common | 0x200E | 0 | 14 | read-only | - | 32 bits | Měřený čas mezi synchronizačními pulsy na sběrnicei (pokud je využito DC) |
|
| C-Enable_1G | Common | 0x200F | 0 | 15 | read-write | - | 32 bits | Povolení rychlosti sběrnice 1G (v přípravě) | |
| C-SetCycleTime | Common | 0x2010 | 0 | 16 | read-write | us | 32 bits | Očekáváná komunikační perioda na sběrnici (pokud není využito DC) |
|
| C-UserProgStart | Common | 0x2011 | 0 | 17 | read-write | - | 32 bits | Povolení automatického startu uživatelského programu : 0 .. Nespouští se, 1 .. Spouští se z interní flash,(2 .. Zpouští se z SD karty .. V přípravě) |
|
| M-Name1 | Axis 1 | Motor | 0x2100 | 1 | 0 | read-write | chars | 32 bits | Název motoru 1 1/6 |
| M-Name1 | Axis 2 | Motor | 0x2200 | 2 | 0 | read-write | chars | 32 bits | Název motoru 2 1/6 |
| M-Name2 | Axis 1 | Motor | 0x2101 | 1 | 1 | read-write | chars | 32 bits | Název motoru 1 2/6 |
| M-Name2 | Axis 2 | Motor | 0x2201 | 2 | 1 | read-write | chars | 32 bits | Název motoru 2 2/6 |
| M-Name3 | Axis 1 | Motor | 0x2102 | 1 | 2 | read-write | chars | 32 bits | Název motoru 1 3/6 |
| M-Name3 | Axis 2 | Motor | 0x2202 | 2 | 2 | read-write | chars | 32 bits | Název motoru 2 3/6 |
| M-Name4 | Axis 1 | Motor | 0x2103 | 1 | 3 | read-write | chars | 32 bits | Název motoru 1 4/6 |
| M-Name4 | Axis 2 | Motor | 0x2203 | 2 | 3 | read-write | chars | 32 bits | Název motoru 2 4/6 |
| M-Name5 | Axis 1 | Motor | 0x2104 | 1 | 4 | read-write | chars | 32 bits | Název motoru 1 5/6 |
| M-Name5 | Axis 2 | Motor | 0x2204 | 2 | 4 | read-write | chars | 32 bits | Název motoru 2 5/6 |
| M-Name6 | Axis 1 | Motor | 0x2105 | 1 | 5 | read-write | chars | 32 bits | Název motoru 1 6/6 |
| M-Name6 | Axis 2 | Motor | 0x2205 | 2 | 5 | read-write | chars | 32 bits | Název motoru 2 6/6 |
| M-Inull | Axis 1 | Motor | 0x2106 | 1 | 6 | read-write | mA(rms) | 32 bits | Povolený trvalý efektivní proud pro motor 1 |
| M-Inull | Axis 2 | Motor | 0x2206 | 2 | 6 | read-write | mA(rms) | 32 bits | Povolený trvalý efektivní proud pro motor 2 |
| M-Ipeak | Axis 1 | Motor | 0x2107 | 1 | 7 | read-write | mA | 32 bits | Povolená špičková hodnota amplitudy proudu pro motor 1 (Iamp = 1.41 * Irms) |
| M-Ipeak | Axis 2 | Motor | 0x2207 | 2 | 7 | read-write | mA | 32 bits | Povolená špičková hodnota amplitudy proudu pro motor 2 (Iamp = 1.41 * Irms) |
| M-Nmax | Axis 1 | Motor | 0x2108 | 1 | 8 | read-write | rpm | 32 bits | Maximální povolená rychlost motoru 1 |
| M-Nmax | Axis 2 | Motor | 0x2208 | 2 | 8 | read-write | rpm | 32 bits | Maximální povolená rychlost motoru 2 |
| M-Polepairs | Axis 1 | Motor | 0x2109 | 1 | 9 | read-write | - | 32 bits | Počet pólpárů motoru 1 ( pólpáry = póly / 2) |
| M-Polepairs | Axis 2 | Motor | 0x2209 | 2 | 9 | read-write | - | 32 bits | Počet pólpárů motoru 2 ( pólpáry = póly / 2) |
| M-CommutOffset | Axis 1 | Motor | 0x210A | 1 | 10 | read-write | - | 32 bits | Úhlové posunutí nuly snímače vůči statorovému vinutí motoru 1 |
| M-CommutOffset | Axis 2 | Motor | 0x220A | 2 | 10 | read-write | - | 32 bits | Úhlové posunutí nuly snímače vůči statorovému vinutí motoru 2 |
| M-MinResTerm | Axis 1 | Motor | 0x210B | 1 | 11 | read-write | Ohm | 32 bits | Minimální odpor teplotního snímače motoru 1 pro vyhodnocení poruchy - vysoká teplota (pouze pro digitální snímače polohy s připojeným teplotním čidlem) |
| M-MinResTerm | Axis 2 | Motor | 0x220B | 2 | 11 | read-write | Ohm | 32 bits | Minimální odpor teplotního snímače motoru 2 pro vyhodnocení poruchy - vysoká teplota (pouze pro digitální snímače polohy s připojeným teplotním čidlem) |
| M-MaxResTerm | Axis 1 | Motor | 0x210C | 1 | 12 | read-write | Ohm | 32 bits | Maximální odpor teplotního snímače motoru 1 pro vyhodnocení poruchy - vysoká teplota (pouze pro digitální snímače polohy s připojeným teplotním čidlem) |
| M-MaxResTerm | Axis 2 | Motor | 0x220C | 2 | 12 | read-write | Ohm | 32 bits | Maximální odpor teplotního snímače motoru 2 pro vyhodnocení poruchy - vysoká teplota (pouze pro digitální snímače polohy s připojeným teplotním čidlem) |
| M-StaticBrake | Axis 1 | Motor | 0x210D | 1 | 13 | read-write | - | 32 bits | Statická brzda motoru 1 : 1 = ano, 0 = ne |
| M-StaticBrake | Axis 2 | Motor | 0x220D | 2 | 13 | read-write | - | 32 bits | Statická brzda motoru 2 : 1 = ano, 0 = ne |
| M-ThermTimeConst | Axis 1 | Motor | 0x210E | 1 | 14 | read-write | s | 32 bits | Teplotní časová konstanta motoru 1 |
| M-ThermTimeConst | Axis 2 | Motor | 0x220E | 2 | 14 | read-write | s | 32 bits | Teplotní časová konstanta motoru 2 |
| D-Name1 | Axis 1 | Drive | 0x2300 | 3 | 0 | read-write | chars | 32 bits | Název pohonu 1 1/3 |
| D-Name1 | Axis 2 | Drive | 0x2400 | 4 | 0 | read-write | chars | 32 bits | Název pohonu 2 1/3 |
| D-Name2 | Axis 1 | Drive | 0x2301 | 3 | 1 | read-write | chars | 32 bits | Název pohonu 1 2/3 |
| D-Name2 | Axis 2 | Drive | 0x2401 | 4 | 1 | read-write | chars | 32 bits | Název pohonu 2 2/3 |
| D-Name3 | Axis 1 | Drive | 0x2302 | 3 | 2 | read-write | chars | 32 bits | Název pohonu 1 3/3 |
| D-Name3 | Axis 2 | Drive | 0x2402 | 4 | 2 | read-write | chars | 32 bits | Název pohonu 2 3/3 |
| D-Mode | Axis 1 | Drive | 0x2303 | 3 | 3 | read-write | - | 32 bits | Režim pohonu 1 - popis v manuálu |
| D-Mode | Axis 2 | Drive | 0x2403 | 4 | 3 | read-write | - | 32 bits | Režim pohonu 2 - popis v manuálu |
| D-DelayEnable_Hwen | Axis 1 | Drive | 0x230A | 3 | 10 | read-write | 0.1ms | 32 bits | Zpoždění enable pohonu 1 po nastupné hraně signálu hw enable X1 |
| D-DelayEnable_Hwen | Axis 2 | Drive | 0x240A | 4 | 10 | read-write | 0.1ms | 32 bits | Zpoždění enable pohonu 2 po nastupné hraně signálu hw enable X1 |
| D-DelayUnbrake_Enable | Axis 1 | Drive | 0x230B | 3 | 11 | read-write | 0.1ms | 32 bits | Zpoždění uvolnění brzdy motoru 1 po enable pohonu |
| D-DelayUnbrake_Enable | Axis 2 | Drive | 0x240B | 4 | 11 | read-write | 0.1ms | 32 bits | Zpoždění uvolnění brzdy motoru 2 po enable pohonu |
| D-DelayDisable_Brake | Axis 1 | Drive | 0x230C | 3 | 12 | read-write | 0.1ms | 32 bits | Zpoždění disble pohonu 1 po zabrždění motoru |
| D-DelayDisable_Brake | Axis 2 | Drive | 0x240C | 4 | 12 | read-write | 0.1ms | 32 bits | Zpoždění disble pohonu 2 po zabrždění motoru |
| D-VoltDCLinkMinErrLim | Drive | 0x230D | 3 | 13 | read-write | V | 32 bits | Minimální napětí meziobvodu pro vyhodnocení chyby podpětí |
|
| D-VoltDCLinkMaxErrLim | Drive | 0x230E | 3 | 14 | read-write | V | 32 bits | Maximální napětí meziobvodu pro vyhodnocení chyby přepětí |
|
| C-K | Axis 1 | Currentcontroller | 0x2500 | 5 | 0 | read-write | mV/A | 32 bits | Zesílení proudového regulátoru složky Q |
| C-K | Axis 2 | Currentcontroller | 0x2600 | 6 | 0 | read-write | mV/A | 32 bits | Zesílení proudového regulátoru složky Q |
| C-Ti | Axis 1 | Currentcontroller | 0x2501 | 5 | 1 | read-write | µs | 32 bits | Integrační čas proudového regulátoru |
| C-Ti | Axis 2 | Currentcontroller | 0x2601 | 6 | 1 | read-write | µs | 32 bits | Integrační čas proudového regulátoru |
| C-KDr | Axis 1 | Currentcontroller | 0x2502 | 5 | 2 | read-write | % | 32 bits | Zesílení proudového regulátoru složky D relativně k zesílení složky Q K |
| C-KDr | Axis 2 | Currentcontroller | 0x2602 | 6 | 2 | read-write | % | 32 bits | Zesílení proudového regulátoru složky D relativně k zesílení složky Q K |
| C-Tc | Axis 1 | Currentcontroller | 0x2503 | 5 | 3 | read-write | µs | 32 bits | Časová konstanta filtru žádaného proudu (nevyužito) |
| C-Tc | Axis 2 | Currentcontroller | 0x2603 | 6 | 3 | read-write | µs | 32 bits | Časová konstanta filtru žádaného proudu (nevyužito) |
| C-Filt | Axis 1 | Currentcontroller | 0x2504 | 5 | 4 | read-write | % | 32 bits | Procentuální hodnota filtrované části žádaného proudu (100 = 100% filtrováno) (nevyužito) |
| C-Filt | Axis 2 | Currentcontroller | 0x2604 | 6 | 4 | read-write | % | 32 bits | Procentuální hodnota filtrované části žádaného proudu (100 = 100% filtrováno) (nevyužito) |
| C-LimN | Axis 1 | Currentcontroller | 0x2505 | 5 | 5 | read-write | 0,1% | 32 bits | Omezení záporné amplitudy proudu (na výstupu rychlostního regulátoru) relativně k M-Inull |
| C-LimN | Axis 2 | Currentcontroller | 0x2605 | 6 | 5 | read-write | 0,1% | 32 bits | Omezení záporné amplitudy proudu (na výstupu rychlostního regulátoru) relativně k M-Inull |
| C-LimP | Axis 1 | Currentcontroller | 0x2506 | 5 | 6 | read-write | 0,1% | 32 bits | Omezení kladné amplitudy proudu (na výstupu rychlostního regulátoru) relativně k M-Inull |
| C-LimP | Axis 2 | Currentcontroller | 0x2606 | 6 | 6 | read-write | 0,1% | 32 bits | Omezení kladné amplitudy proudu (na výstupu rychlostního regulátoru) relativně k M-Inull |
| C-VoltLimMin | Axis 1 | Currentcontroller | 0x2507 | 5 | 7 | read-write | % | 32 bits | Omezení záporného napětí na výstupu proudového regulátoru |
| C-VoltLimMin | Axis 2 | Currentcontroller | 0x2607 | 6 | 7 | read-write | % | 32 bits | Omezení záporného napětí na výstupu proudového regulátoru |
| C-VoltLimMax | Axis 1 | Currentcontroller | 0x2508 | 5 | 8 | read-write | % | 32 bits | Omezení kladného napětí na výstupu proudového regulátoru |
| C-VoltLimMax | Axis 2 | Currentcontroller | 0x2608 | 6 | 8 | read-write | % | 32 bits | Omezení kladného napětí na výstupu proudového regulátoru |
| C-CogCompFac | Axis 1 | Currentcontroller | 0x2509 | 5 | 9 | read-write | % | 32 bits | Faktor kompenzace coggingu 0.. Vypnuto (před zapnutím musí být změřena kompenzační tabulka pro daný motor) |
| C-CogCompFac | Axis 2 | Currentcontroller | 0x2609 | 6 | 9 | read-write | % | 32 bits | Faktor kompenzace coggingu 0.. Vypnuto (před zapnutím musí být změřena kompenzační tabulka pro daný motor) |
| V-K | Axis 1 | Velocitycontroller | 0x2700 | 7 | 0 | read-write | mA/1000rpm | 32 bits | Zesílení rychlostního regulátoru |
| V-K | Axis 2 | Velocitycontroller | 0x2800 | 8 | 0 | read-write | mA/1000rpm | 32 bits | Zesílení rychlostního regulátoru |
| V-Ti | Axis 1 | Velocitycontroller | 0x2701 | 7 | 1 | read-write | µs | 32 bits | Integrační čas rychlostního regulátoru |
| V-Ti | Axis 2 | Velocitycontroller | 0x2801 | 8 | 1 | read-write | µs | 32 bits | Integrační čas rychlostního regulátoru |
| V-LimN | Axis 1 | Velocitycontroller | 0x2702 | 7 | 2 | read-write | rpm | 32 bits | Omezení maximální záporné rychlosti (na výstupu polohového regulátoru) |
| V-LimN | Axis 2 | Velocitycontroller | 0x2802 | 8 | 2 | read-write | rpm | 32 bits | Omezení maximální záporné rychlosti (na výstupu polohového regulátoru) |
| V-LimP | Axis 1 | Velocitycontroller | 0x2703 | 7 | 3 | read-write | rpm | 32 bits | Omezení maximální kladné rychlosti (na výstupu polohového regulátoru) |
| V-LimP | Axis 2 | Velocitycontroller | 0x2803 | 8 | 3 | read-write | rpm | 32 bits | Omezení maximální kladné rychlosti (na výstupu polohového regulátoru) |
| V-Tfb | Axis 1 | Velocitycontroller | 0x2704 | 7 | 4 | read-write | µs | 32 bits | časová konstanta filtru (dolní propust) skutečné rychlosti (nevyužito) |
| V-Tfb | Axis 2 | Velocitycontroller | 0x2804 | 8 | 4 | read-write | µs | 32 bits | časová konstanta filtru (dolní propust) skutečné rychlosti (nevyužito) |
| V-Tv | Axis 1 | Velocitycontroller | 0x2705 | 7 | 5 | read-write | µs | 32 bits | časová konstanta filtru (dolní propust) žádané rychlosti (nevyužito) |
| V-Tv | Axis 2 | Velocitycontroller | 0x2805 | 8 | 5 | read-write | µs | 32 bits | časová konstanta filtru (dolní propust) žádané rychlosti (nevyužito) |
| V-FiFact | Axis 1 | Velocitycontroller | 0x2706 | 7 | 6 | read-write | 0,1% | 32 bits | Faktor filtrace rychlosti 0..nefiltrováno (nevyužito) |
| V-FiFact | Axis 2 | Velocitycontroller | 0x2806 | 8 | 6 | read-write | 0,1% | 32 bits | Faktor filtrace rychlosti 0..nefiltrováno (nevyužito) |
| P-K | Axis 1 | Positioncontroller | 0x2900 | 9 | 0 | read-write | 0.001 1/s | 32 bits | Zesílení polohového regulátoru |
| P-K | Axis 2 | Positioncontroller | 0x2A00 | 10 | 0 | read-write | 0.001 1/s | 32 bits | Zesílení polohového regulátoru |
| P-SFF | Axis 1 | Positioncontroller | 0x2901 | 9 | 1 | read-write | 0,1% | 32 bits | Rychlostní předkorekce |
| P-SFF | Axis 2 | Positioncontroller | 0x2A01 | 10 | 1 | read-write | 0,1% | 32 bits | Rychlostní předkorekce |
| P-MaxAngleError | Axis 1 | Positioncontroller | 0x2902 | 9 | 2 | read-write | --- | 32 bits | maximální poziční chyba - úhel |
| P-MaxAngleError | Axis 2 | Positioncontroller | 0x2A02 | 10 | 2 | read-write | --- | 32 bits | maximální poziční chyba - úhel |
| P-MaxRevolError | Axis 1 | Positioncontroller | 0x2903 | 9 | 3 | read-write | --- | 32 bits | maximální poziční chyba - otáčky |
| P-MaxRevolError | Axis 2 | Positioncontroller | 0x2A03 | 10 | 3 | read-write | --- | 32 bits | maximální poziční chyba - otáčky |
| F-Type | Axis 1 | Feedback | 0x2B00 | 11 | 0 | read-write | - | 32 bits | Typ zpětné vazby : 1.. Hiperface DSL, 2.. Endat , 4.. Incremental, 6.. BISS, 7.. SSI |
| F-Type | Axis 2 | Feedback | 0x2C00 | 12 | 0 | read-write | - | 32 bits | Typ zpětné vazby : 1.. Hiperface DSL, 2.. Endat , 4.. Incremental, 6.. BISS, 7.. SSI |
| F-Resolution | Axis 1 | Feedback | 0x2B01 | 11 | 1 | read-write | - | 32 bits | Rozlišení zpětné vazby v rámci jedné otáčky (jen pro čtení pro digitální zpětné vzby 1 a 2) |
| F-Resolution | Axis 2 | Feedback | 0x2C01 | 12 | 1 | read-write | - | 32 bits | Rozlišení zpětné vazby v rámci jedné otáčky (jen pro čtení pro digitální zpětné vzby 1 a 2) |
| F-IncrEnc | Axis 1 | Feedback | 0x2B02 | 11 | 2 | read-write | pulses | 32 bits | Rozlišení inkrementálního snímače |
| F-IncrEnc | Axis 2 | Feedback | 0x2C02 | 12 | 2 | read-write | pulses | 32 bits | Rozlišení inkrementálního snímače |
| F-ExtIncrEnc | Feedback | 0x2B03 | 11 | 3 | read-write | pulses | 32 bits | Rozlišení externího inkrementálního snímače | |
| F-ResolverPoles | Axis 1 | Feedback | 0x2B04 | 11 | 4 | read-write | - | 32 bits | Počet pólů resolveru (nevyužito - pouze pro rozšiřující desku) |
| F-ResolverPoles | Axis 2 | Feedback | 0x2C04 | 12 | 4 | read-write | - | 32 bits | Počet pólů resolveru (nevyužito - pouze pro rozšiřující desku) |
| K-Command | Axis 1 | Command | 0x3100 | 17 | 0 | read-write | - | 32 bits | Příkaz bity[1,0]=01 .. SW enable bit[3] = 1 .. Reset chyb |
| K-Command | Axis 2 | Command | 0x3200 | 18 | 0 | read-write | - | 32 bits | Příkaz bity[1,0]=01 .. SW enable bit[3] = 1 .. Reset chyb |
| K-I | Axis 1 | Command | 0x3101 | 17 | 1 | read-write | mA | 32 bits | Žádaný proud (proudový režim = 1) |
| K-I | Axis 2 | Command | 0x3201 | 18 | 1 | read-write | mA | 32 bits | Žádaný proud (proudový režim = 1) |
| K-V | Axis 1 | Command | 0x3102 | 17 | 2 | read-write | rpm | 32 bits | Žádaná rychlost (rychlostní režim = 2) |
| K-V | Axis 2 | Command | 0x3202 | 18 | 2 | read-write | rpm | 32 bits | Žádaná rychlost (rychlostní režim = 2) |
| K-P_Angle | Axis 1 | Command | 0x3103 | 17 | 3 | read-write | - | 32 bits | Žádaná poloha - úhel (polohový režim = 3) |
| K-P_Angle | Axis 2 | Command | 0x3203 | 18 | 3 | read-write | - | 32 bits | Žádaná poloha - úhel (polohový režim = 3) |
| K-P_Revol | Axis 1 | Command | 0x3104 | 17 | 4 | read-write | - | 32 bits | Žádaná poloha - otáčky (polohový režim = 3) |
| K-P_Revol | Axis 2 | Command | 0x3204 | 18 | 4 | read-write | - | 32 bits | Žádaná poloha - otáčky (polohový režim = 3) |
| K-DigitalOutputForce_Set | Axis 1 | Command | 0x3109 | 17 | 9 | read-write | - | 32 bits | nastavení výstupů s vyšší prioritou do 1 |
| K-DigitalOutputForce_Set | Axis 2 | Command | 0x3209 | 18 | 9 | read-write | - | 32 bits | nastavení výstupů s vyšší prioritou do 1 |
| K-DigitalOutputForce_Clr | Axis 1 | Command | 0x310A | 17 | 10 | read-write | - | 32 bits | nastavení výstupů s vyšší prioritou do 0 |
| K-DigitalOutputForce_Clr | Axis 2 | Command | 0x320A | 18 | 10 | read-write | - | 32 bits | nastavení výstupů s vyšší prioritou do 0 |
| Monitor-Counter | Monitoring | 0x3300 | 19 | 0 | read-only | - | 32 bits | Hlavní čítač | |
| aIa | Axis 1 | Monitoring | 0x3301 | 19 | 1 | read-only | mA | 32 bits | Aktuální proud ve fázi A |
| aIa | Axis 2 | Monitoring | 0x3401 | 20 | 1 | read-only | mA | 32 bits | Aktuální proud ve fázi A |
| aIb | Axis 1 | Monitoring | 0x3302 | 19 | 2 | read-only | mA | 32 bits | Aktuální proud ve fázi B |
| aIb | Axis 2 | Monitoring | 0x3402 | 20 | 2 | read-only | mA | 32 bits | Aktuální proud ve fázi B |
| aIc | Axis 1 | Monitoring | 0x3303 | 19 | 3 | read-only | mA | 32 bits | Aktuální proud ve fázi C |
| aIc | Axis 2 | Monitoring | 0x3403 | 20 | 3 | read-only | mA | 32 bits | Aktuální proud ve fázi C |
| aIq | Axis 1 | Monitoring | 0x3306 | 19 | 6 | read-only | mA | 32 bits | Aktuální proud složka Q |
| aIq | Axis 2 | Monitoring | 0x3406 | 20 | 6 | read-only | mA | 32 bits | Aktuální proud složka Q |
| aId | Axis 1 | Monitoring | 0x3307 | 19 | 7 | read-only | mA | 32 bits | Aktuální proud složka D |
| aId | Axis 2 | Monitoring | 0x3407 | 20 | 7 | read-only | mA | 32 bits | Aktuální proud složka D |
| aAngle | Axis 1 | Monitoring | 0x3310 | 19 | 16 | read-only | inc | 32 bits | Aktuální poloha v rámci otáčky (rozlišení : 32 bitů na otáčku) |
| aAngle | Axis 2 | Monitoring | 0x3410 | 20 | 16 | read-only | inc | 32 bits | Aktuální poloha v rámci otáčky (rozlišení : 32 bitů na otáčku) |
| aRevol | Axis 1 | Monitoring | 0x3311 | 19 | 17 | read-only | 1 | 32 bits | Aktuální poloha - počet otáček |
| aRevol | Axis 2 | Monitoring | 0x3411 | 20 | 17 | read-only | 1 | 32 bits | Aktuální poloha - počet otáček |
| aSpeed | Axis 1 | Monitoring | 0x3312 | 19 | 18 | read-only | rpm | 32 bits | Aktuální rychlost motoru |
| aSpeed | Axis 2 | Monitoring | 0x3412 | 20 | 18 | read-only | rpm | 32 bits | Aktuální rychlost motoru |
| aSpeedError | Axis 1 | Monitoring | 0x3314 | 19 | 20 | read-only | rpm | 32 bits | Aktuální regulační odchylka rychlosti |
| aSpeedError | Axis 2 | Monitoring | 0x3414 | 20 | 20 | read-only | rpm | 32 bits | Aktuální regulační odchylka rychlosti |
| aAngleError | Axis 1 | Monitoring | 0x331C | 19 | 28 | read-only | rpm | 32 bits | Aktuální regulační odchylka polohy - úhel |
| aAngleError | Axis 2 | Monitoring | 0x341C | 20 | 28 | read-only | rpm | 32 bits | Aktuální regulační odchylka polohy - úhel |
| aRevolError | Axis 1 | Monitoring | 0x331D | 19 | 29 | read-only | rpm | 32 bits | Aktuální regulační odchylka polohy - otáčky |
| aRevolError | Axis 2 | Monitoring | 0x341D | 20 | 29 | read-only | rpm | 32 bits | Aktuální regulační odchylka polohy - otáčky |
| aDriveStatus | Axis 1 | Monitoring | 0x3325 | 19 | 37 | read-only | -- | 32 bits | Stav servozesilovače : bit[0] = 1 .. Enabled, bit[1] = 1 .. HW Enable signal, bit[2] = 1 .. Software enable, bit[3] = 1 .. Brake released, bit [4] = 1 .. No error, bit[5] = 1 .. Initialization finished, bit[6] = 1 ..fieldbus mode, .............. |
| aDriveStatus | Axis 2 | Monitoring | 0x3425 | 20 | 37 | read-only | -- | 32 bits | Stav servozesilovače : bit[0] = 1 .. Enabled, bit[1] = 1 .. HW Enable signal, bit[2] = 1 .. Software enable, bit[3] = 1 .. Brake released, bit [4] = 1 .. No error, bit[5] = 1 .. Initialization finished, bit[6] = 1 ..fieldbus mode, .............. |
| aDriveError | Axis 1 | Monitoring | 0x3326 | 19 | 38 | read-only | -- | 32 bits | Chyba servozesilovače (viz manuál) |
| aDriveError | Axis 2 | Monitoring | 0x3426 | 20 | 38 | read-only | -- | 32 bits | Chyba servozesilovače (viz manuál) |
| aDriveWarning | Axis 1 | Monitoring | 0x3327 | 19 | 39 | read-only | -- | 32 bits | Varování (nevyužito) |
| aDriveWarning | Axis 2 | Monitoring | 0x3427 | 20 | 39 | read-only | -- | 32 bits | Varování (nevyužito) |
| AnInput | Axis 1 | Monitoring | 0x3328 | 19 | 40 | read-only | 0,1% | 32 bits | Analogový vstup 1 |
| AnInput | Axis 2 | Monitoring | 0x3428 | 20 | 40 | read-only | 0,1% | 32 bits | Analogový vstup 2 |
| VoltDCLink | Monitoring | 0x3329 | 19 | 41 | read-only | V | 32 bits | Napětí meziobvodu | |
| OnChipTemp | Monitoring | 0x332A | 19 | 42 | read-only | deg | 32 bits | Teplota procesoru | |
| ec_SetPointAngle | Axis 1 | Monitoring | 0x332B | 19 | 43 | read-only | inc | 32 bits | Požadovaná poloha v rámci otáčky - řízení přes sběrnici |
| ec_SetPointAngle | Axis 2 | Monitoring | 0x342B | 20 | 43 | read-only | inc | 32 bits | Požadovaná poloha v rámci otáčky - řízení přes sběrnici |
| ec_SetPointRevol | Axis 1 | Monitoring | 0x332C | 19 | 44 | read-only | 1 | 32 bits | Požadovaná poloha počet otáček - řízení přes sběrnici |
| ec_SetPointRevol | Axis 2 | Monitoring | 0x342C | 20 | 44 | read-only | 1 | 32 bits | Požadovaná poloha počet otáček - řízení přes sběrnici |
| ec_control | Axis 1 | Monitoring | 0x332D | 19 | 45 | read-only | 1 | 32 bits | Řídící registr - řízení přes sběrnici |
| ec_control | Axis 2 | Monitoring | 0x342D | 20 | 45 | read-only | 1 | 32 bits | Řídící registr - řízení přes sběrnici |
| ec_currentSetPoint | Axis 1 | Monitoring | 0x332E | 19 | 46 | read-only | 1 | 32 bits | Žádaný proud - řízení přes sběrnici |
| ec_currentSetPoint | Axis 2 | Monitoring | 0x342E | 20 | 46 | read-only | 1 | 32 bits | Žádaný proud - řízení přes sběrnici |
| ec_currentLimit | Axis 1 | Monitoring | 0x332F | 19 | 47 | read-only | 1 | 32 bits | Proudové omezení - řízení přes sběrnici |
| ec_currentLimit | Axis 2 | Monitoring | 0x342F | 20 | 47 | read-only | 1 | 32 bits | Proudové omezení - řízení přes sběrnici |
| Digital_Inputs | Axis 1 | Monitoring | 0x3330 | 19 | 48 | read-only | - | 32 bits | Digitální vstupy : bit[0] .. IN1,bit[1] .. IN3,bit[2] .. IN5,bit[3] .. IN7 |
| Digital_Inputs | Axis 2 | Monitoring | 0x3430 | 20 | 48 | read-only | - | 32 bits | Digitální vstupy : bit[0] .. IN2,bit[1] .. IN4,bit[2] .. IN6,bit[3] .. IN8 |
| Motor_temperature | Axis 1 | Monitoring | 0x3331 | 19 | 49 | read-only | Ohm | 32 bits | Odpor teplotního čidla motoru (pouze pro digitální zpětnou vazbu s připojeným teplotním čidlem) |
| Motor_temperature | Axis 2 | Monitoring | 0x3431 | 20 | 49 | read-only | Ohm | 32 bits | Odpor teplotního čidla motoru (pouze pro digitální zpětnou vazbu s připojeným teplotním čidlem) |
| rIq | Axis 1 | Monitoring | 0x3332 | 19 | 50 | read-only | mA | 32 bits | Žádaný proud (vstup do proudového regulátoru) |
| rIq | Axis 2 | Monitoring | 0x3432 | 20 | 50 | read-only | mA | 32 bits | Žádaný proud (vstup do proudového regulátoru) |
| Ia_rms | Axis 1 | Monitoring | 0x3333 | 19 | 51 | read-only | mA | 32 bits | Efektivní hodnota proudu Ia |
| Ia_rms | Axis 2 | Monitoring | 0x3433 | 20 | 51 | read-only | mA | 32 bits | Efektivní hodnota proudu Ia |
| Ib_rms | Axis 1 | Monitoring | 0x3334 | 19 | 52 | read-only | mA | 32 bits | Efektivní hodnota proudu Ib |
| Ib_rms | Axis 2 | Monitoring | 0x3434 | 20 | 52 | read-only | mA | 32 bits | Efektivní hodnota proudu Ib |
| Ic_rms | Axis 1 | Monitoring | 0x3335 | 19 | 53 | read-only | mA | 32 bits | Efektivní hodnota proudu Ic |
| Ic_rms | Axis 2 | Monitoring | 0x3435 | 20 | 53 | read-only | mA | 32 bits | Efektivní hodnota proudu Ic |
| aI2t | Axis 1 | Monitoring | 0x3337 | 19 | 55 | read-only | mA | 32 bits | Hodnota I2t |
| aI2t | Axis 2 | Monitoring | 0x3437 | 20 | 55 | read-only | mA | 32 bits | Hodnota i2t |
| rAngle | Axis 1 | Monitoring | 0x3338 | 19 | 56 | read-only | inc | 32 bits | Žádaná hodnota polohy - v rámci otáčky (vstup polohového regulátoru) |
| rAngle | Axis 2 | Monitoring | 0x3438 | 20 | 56 | read-only | inc | 32 bits | Žádaná hodnota polohy - v rámci otáčky (vstup polohového regulátoru) |
| rRevol | Axis 1 | Monitoring | 0x3339 | 19 | 57 | read-only | 1 | 32 bits | Žádaná hodnota polohy - počet otáček (vstup polohového regulátoru) |
| rRevol | Axis 2 | Monitoring | 0x3439 | 20 | 57 | read-only | 1 | 32 bits | Žádaná hodnota polohy - počet otáček (vstup polohového regulátoru) |
| rSpeed | Axis 1 | Monitoring | 0x333A | 19 | 58 | read-only | rpm | 32 bits | Žádaná rychlost (vstup rychlostního regulátoru) |
| rSpeed | Axis 2 | Monitoring | 0x343A | 20 | 58 | read-only | rpm | 32 bits | Žádaná rychlost (vstup rychlostního regulátoru) |
| DSL_status | Axis 1 | Monitoring | 0x333B | 19 | 59 | read-only | bit | 32 bits | Stav DSL enkodéru |
| DSL_status | Axis 2 | Monitoring | 0x343B | 20 | 59 | read-only | bit | 32 bits | Stav DSL enkodéru |
| DO | Axis 1 | Monitoring | 0x333C | 19 | 60 | read-write | bit | 32 bits | Digitální výstupy: bit[0] .. Out1, bit[1] .. Out3, bit[2] .. Out5 |
| DO | Axis 2 | Monitoring | 0x343C | 20 | 60 | read-write | bit | 32 bits | Digitální výstupy: bit[0] .. Out2, bit[1] .. Out4, bit[2] .. Out6 |
| C-PackeTime | Monitoring | 0x3340 | 19 | 64 | read-only | - | 32 bits | Měřený čas mezi pakety při řízení po sběrnici | |
| Acc | Axis 1 | PG | 0x3900 | 25 | 0 | read-write | pginc/s2 | 32 bits | Žádané zrychlení pohybu [ inc/s2 ] .. Viz funkční manuál |
| Acc | Axis 2 | PG | 0x3A00 | 26 | 0 | read-write | pginc/s2 | 32 bits | Žádané zrychlení pohybu [ inc/s2 ] .. Viz funkční manuál |
| Dec | Axis 1 | PG | 0x3901 | 25 | 1 | read-write | pginc/s2 | 32 bits | Žádané zpomalení pohybu [ inc/s2 ] .. Viz funkční manuál |
| Dec | Axis 2 | PG | 0x3A01 | 26 | 1 | read-write | pginc/s2 | 32 bits | Žádané zpomalení pohybu [ inc/s2 ] .. Viz funkční manuál |
| APosAngle | Axis 1 | PG | 0x3902 | 25 | 2 | read-only | inc | 32 bits | Aktuální poloha na výstupu pg .. Viz funkční manuál |
| APosAngle | Axis 2 | PG | 0x3A02 | 26 | 2 | read-only | inc | 32 bits | Aktuální poloha na výstupu pg .. Viz funkční manuál |
| APosRevol | Axis 1 | PG | 0x3903 | 25 | 3 | read-only | inc | 32 bits | Aktuální poloha na výstupu pg .. Viz funkční manuál |
| APosRevol | Axis 2 | PG | 0x3A03 | 26 | 3 | read-only | inc | 32 bits | Aktuální poloha na výstupu pg .. Viz funkční manuál |
| DPosAngle | Axis 1 | PG | 0x3904 | 25 | 4 | read-write | inc | 32 bits | Cílová poloha .. Viz funkční manuál |
| DPosAngle | Axis 2 | PG | 0x3A04 | 26 | 4 | read-write | inc | 32 bits | Cílová poloha .. Viz funkční manuál |
| DPosRevol | Axis 1 | PG | 0x3905 | 25 | 5 | read-write | inc | 32 bits | Cílová poloha .. Viz funkční manuál |
| DPosRevol | Axis 2 | PG | 0x3A05 | 26 | 5 | read-write | inc | 32 bits | Cílová poloha .. Viz funkční manuál |
| ASpeed | Axis 1 | PG | 0x3906 | 25 | 6 | read-only | pginc/s | 32 bits | Aktuální rychlost na výstupu pg .. Viz funkční manuál |
| ASpeed | Axis 2 | PG | 0x3A06 | 26 | 6 | read-only | pginc/s | 32 bits | Aktuální rychlost na výstupu pg .. Viz funkční manuál |
| PosSpeed | Axis 1 | PG | 0x3907 | 25 | 7 | read-write | pginc/s | 32 bits | Žádaná rychlost v polohovém módu .. Viz funkční manuál |
| PosSpeed | Axis 2 | PG | 0x3A07 | 26 | 7 | read-write | pginc/s | 32 bits | Žádaná rychlost v polohovém módu .. Viz funkční manuál |
| Speed | Axis 1 | PG | 0x3908 | 25 | 8 | read-write | pginc/s | 32 bits | Žádaná rychlost v rychlostním módu .. Viz funkční manuál |
| Speed | Axis 2 | PG | 0x3A08 | 26 | 8 | read-write | pginc/s | 32 bits | Žádaná rychlost v rychlostním módu .. Viz funkční manuál |
| Mode | Axis 1 | PG | 0x3909 | 25 | 9 | read-write | - | 32 bits | Režim generátoru profilu 0 = rychlostní režim, 1 = polohový režim, 2 = (pouze pro čtení) zpomalování v polohovém režimu .. Viz manuál |
| Mode | Axis 2 | PG | 0x3A09 | 26 | 9 | read-write | - | 32 bits | Režim generátoru profilu 0 = rychlostní režim, 1 = polohový režim, 2 = (pouze pro čtení) zpomalování v polohovém režimu .. Viz manuál |
| Rdy | Axis 1 | PG | 0x390A | 25 | 10 | read-write | - | 32 bits | Signalizace polohování: 1 = dosažena cílová poloha .. Viz funkční manuál |
| Rdy | Axis 2 | PG | 0x3A0A | 26 | 10 | read-write | - | 32 bits | Signalizace polohování: 1 = dosažena cílová poloha .. Viz funkční manuál |
| Type | Axis 1 | PG | 0x390B | 25 | 11 | read-write | - | 32 bits | Typ rychlostního profilu : 0 = harmonic non symetric, 1 = harmonic symetric, 2 = full harmonic, 3 = trapezoidal .. Viz funkční manuál |
| Type | Axis 2 | PG | 0x3A0B | 26 | 11 | read-write | - | 32 bits | Typ rychlostního profilu : 0 = harmonic non symetric, 1 = harmonic symetric, 2 = full harmonic, 3 = trapezoidal .. Viz funkční manuál |
| BitsPerRevol | Axis 1 | PG | 0x390C | 25 | 12 | read-write | - | 32 bits | Počet bitů na otáčku pro vnitřní výpočty pg. Ovlivňuje rozlišení rychlostí a zrychlení (zpomalení) .. Viz funkční manuál |
| BitsPerRevol | Axis 2 | PG | 0x3A0C | 26 | 12 | read-write | - | 32 bits | Počet bitů na otáčku pro vnitřní výpočty pg. Ovlivňuje rozlišení rychlostí a zrychlení (zpomalení) .. Viz funkční manuál |