Profile generator
Základní popis¶
Generátor žádané polohy.
Umožňuje jednoduchým způsobem polohovat z bodu do bodu a rychlostně řídit servopohon.
Výstupem generátoru je proměnná 64 bitová poloha, která se skládá ze dvou 32 bitových proměnných APosAngle a APosRevol a dále proměnné ASpeed určující aktuální žádanou hodnotu rychlosti.
Parametry generátoru jsou Acc a Dec, které určují akceleraci resp. deceleraci pohonu, parametr Type určuje průběh rychlosti při akceleraci a deceleraci (viz. schéma níže).
Dalším parametrem je PosSpeed, který určuje maximální rychlost při zapolohování, parametry DPosAngle a DposRevol určují cílovou polohu a parametr Speed určuje žádanou hodnotu rychlosti.
Pomocí proměnných Mode a Rdy se realizuje vlastní ovládání generátoru.
Proměnná Mode určuje režim PG (hodnota 0 udává rychlostní režim, hodnota 1 udává polohový režim).
Pokud je polohování úspěšně dokončeno a výstupní poloha je shodná se žádanou, pak je tento stav signalizován hodnotou proměnné Rdy = 1.
Generátor pracuje tak, že v každé periodě na základě parametrů (Acc, Dec, Type, PosSpeed, DPosAngle a DPosRevol) a stavu proměnných Mode a Speed vypočítá aktuální žádanou hodnotu polohy APosAngle a APosRevol a aktuální žádanou hodnotu rychlosti ASpeed.
Výpočet generátoru probíhá s interním rozlišením daným parametrem BitsPerRevol.
Tento parametr pak udává vnitřní počet inkrementů na otáčku.
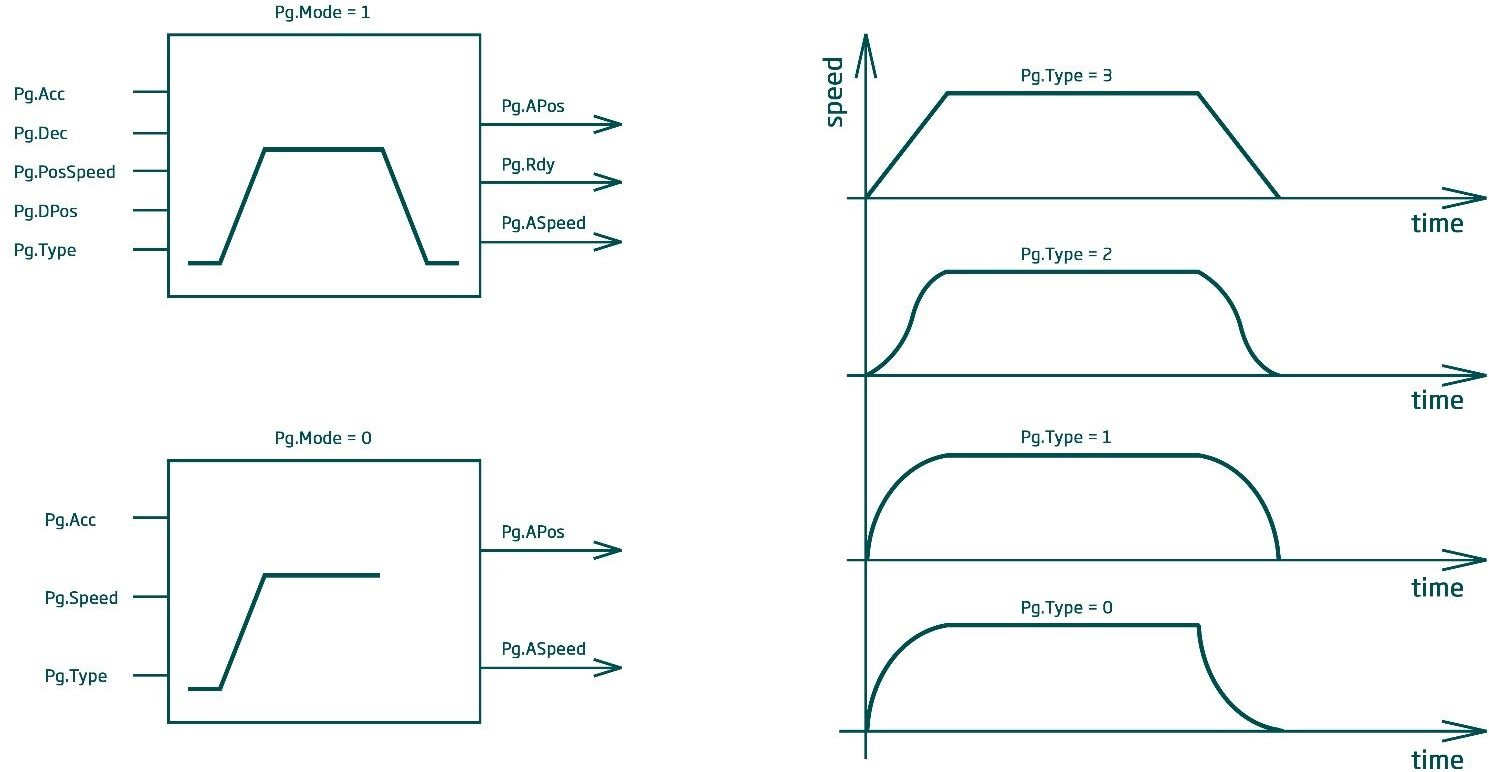
- (a) Polohový mód
- (b) rychlostní režim
- (c) typ náběžných a sestupných ramp
Následující parametry pracují s tímto rozlišením:
| Parameter | Jednotka |
|---|---|
| Acc, Dec | [Inc/s²] |
| ASpeed, DSpeed, Speed | [Inc/s] |
Polohové parametry jsou 64 bitové a jsou složeny ze dvou 32 bitových registrů:
- Registr Angle udává polohu v rámci jedné otáčky s rozlišením 32 bitů
- Registr Revol je rozšíření o 32 bitů (počet celých otáček):
- DPosRevol, DPosAngle
- APosRevol, APosAngle
V uživatelském programu je možno pro zjednodušení práce s generátorem profilu využívat tyto vestavěné funkce:
- Relativní polohování - jedná se o přejezd o polohu:
int PosRel(int axis, int Acc, int Dec, int Speed, long long Pos, int AddGear); - Absolutní polohování - jedná se nájezd do absolutní polohy:
int PosAbs(int axis, int Acc, int Dec, int Speed, long long Pos, int AddGear); - Rychlostní přejezd - pohon se roztočí danou rychlostí.
int RunSpeed(int axis, int Acc, int Speed, int AddGear);
Popis parametrů: axis - 0 -> osa 1; axis 1 - osa 2 Acc,Dec ... Ve stejném významu jako parametry PG popsané výše Speed ... Maximální rychlost polohového přejezdu nebo rychlost rychlostního přejezdu AddGear ... zatím není implementován (bude určovat spolupráci s modulem Gear - převod)
Příklady řízení motoru prostřednictvím Profil Generátoru¶
Následující tabulky poskytují příklady použití profilu generátoru, který je nastaven na různé režimy řízení motoru. Ve sloupci Základní skupiny je uveden název stránky. Přepínání mezi jednotlivými stránkami je povoleno v levém horním rohu grafického uživatelského rozhraní TGZ.
Poznámka
V prvním kroku je důležité nastavit / načíst správné parametry pohonu. Nahrávání parametrů je umožněno pomocí modré obálky v pravém horním rohu (LOAD PARAMETERS FROM FILE), viz. Návod k TGZ GUI
Řízení polohy motoru (TGZ GUI)¶
| Krok | Základní skupina | Parametr | Hodnota | Popis |
|---|---|---|---|---|
| 1 | - | - | - | Načíst parametry pohonu. |
| 2 | Drive | D-mode | 7 | Generátor profilů - režim polohy. |
| 3 | Command | K-Command | 1 | SW enable. Lze jej také zapnout pomocí tlačítka enable pro příslušnou osu na spodní liště. Motor generuje točivý moment. |
| 4 | PG | Acc | 5 000 000 1 | [inc/s²] Požadovaná akcelerace. |
| 5 | PG | Dec | 5 000 000 1 | [inc/s²] Požadované zpomalení. |
| 6 | PG | PosSpeed | 1 000 000 1 | [inc/s] Požadovaná rychlost pohybu v pozičním režimu. |
| 7 | PG | Mode | 1 | Poziční režim. |
| 8 | PG | Type | 1 | Požadovaný typ rampy. Viz Obrázek 1. |
| 9 | PG | DPosAngle | 0 | [inc] Požadovaná poloha v rozsahu jedné otáčky. Po zadání hodnoty a stisknutí klávesy Enter se motor otočí do požadované polohy. |
| 10 | PG | DPosRevol | 20 1 | [inc] Požadovaná poloha v rozsahu víceotáčkového pohybu. Po zadání hodnoty a stisknutí klávesy Enter se motor otočí do požadované polohy. |
Řízení polohy motoru (UDP)¶
D-mode
Popis: Nastavení módu servozesilovače: Profil Generátor – polohový režim.
| Telegram: Požadavek | ||||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 |
| 0x47 | 0x54 | 0x02 | 0x03 | 0x03 | 0x07 | 0x00 | 0x00 | 0x00 |
| Telegram: Odpověď | ||||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | (Byte 6, 10 = 0 : žádný Error) | ||
| 0x47 | 0x54 | 0x02 | 0x03 | 0x03 | 0x00 | |||
PG – Acc, Dec, PosSpeed, Type, Mode, DPosAngle, DPosRevol
Popis: Nastavení požadovaného zrychlení, zpomalení, žádané rychlosti (do najetí do nulové polohy), typu rampy (viz Obrázek 1Obrázek 1), módu Profil Generátoru a nulové požadované hodnoty polohy (počáteční stav).
| Telegram: | Požadavek | |||||||||||||||||||||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 | ||||||||||||||||||
| 0x47 | 0x54 | 0x04 | 0x19 | 0x00 | 0x02 | 0x40 | 0x4B | 0x4C | ||||||||||||||||||
| Byte 9 | Byte 10 | Byte 11 | Byte 12 | Byte 13 | Byte 14 | Byte 15 | Byte 16 | Byte 17 | ||||||||||||||||||
| 0x00 | 0x40 | 0x4B | 0x4C | 0x00 | 0x02 | 0x19 | 0x07 | 0x40 | ||||||||||||||||||
| Byte 18 | Byte 19 | Byte 20 | Byte 21 | Byte 22 | Byte 23 | Byte 24 | Byte 25 | Byte 26 | ||||||||||||||||||
| 0x42 | 0x0F | 0x00 | 0x02 | 0x19 | 0x0B | 0x01 | 0x00 | 0x00 | ||||||||||||||||||
| Byte 27 | Byte 28 | Byte 29 | Byte 30 | Byte 31 | Byte 32 | Byte 33 | Byte 34 | Byte 35 | ||||||||||||||||||
| 0x00 | 0x02 | 0x19 | 0x09 | 0x01 | 0x00 | 0x00 | 0x00 | 0x04 | ||||||||||||||||||
| Byte 36 | Byte 37 | Byte 38 | Byte 39 | Byte 40 | Byte 41 | Byte 42 | Byte 43 | Byte 44 | ||||||||||||||||||
| 0x19 | 0x04 | 0x02 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | ||||||||||||||||||
| Byte 45 | Byte 46 | |||||||||||||||||||||||||
| 0x00 | 0x00 | |||||||||||||||||||||||||
| Telegram: | Odpověď | (Byte 6, 10 = 0 : no Error) | ||||||||||||||||||||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 | ||||||||||||||||||
| 0x47 | 0x54 | 0x04 | 0x19 | 0x00 | 0x00 | 0x02 | 0x02 | 0x19 | ||||||||||||||||||
| Byte 9 | Byte 10 | Byte 11 | Byte 12 | Byte 13 | Byte 14 | Byte 15 | Byte 16 | Byte 17 | ||||||||||||||||||
| 0x07 | 0x00 | 0x02 | 0x19 | 0x0B | 0x00 | 0x02 | 0x19 | 0x09 | ||||||||||||||||||
| Byte 18 | Byte 19 | Byte 20 | Byte 21 | Byte 22 | Byte 23 | |||||||||||||||||||||
| 0x00 | 0x04 | 0x19 | 0x04 | 0x00 | 0x02 | |||||||||||||||||||||
K – Command
Popis: SW enable.
Po zadání tohoto příkazu je motor pod momentem a provede natočení do požadované polohy z předchozího požadavku.
| Telegram: | Požadavek | ||||||||||||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 | |||||||||
| 0x47 | 0x54 | 0x02 | 0x11 | 0x00 | 0x01 | 0x00 | 0x00 | 0x00 | |||||||||
| Telegram: | Odpověď | (Byte 6, 10 = 0 : no Error) | |||||||||||||||
| Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | ||||||||||||
| 0x47 | 0x54 | 0x02 | 0x11 | 0x00 | 0x00 | ||||||||||||
Řízení rychlosti motoru (TGZ GUI)¶
| Krok | Základní skupina | Parametr | Hodnota | Popis |
|---|---|---|---|---|
| 1 | - | - | - | Načíst parametry pohonu. |
| 2 | Drive | D-mode | 7 | Generátor profilů - režim polohy. |
| 3 | Command | K-Command | 1 | SW povolení. Lze jej také zapnout pomocí aktivačního tlačítka na spodní liště. Motor generuje točivý moment. |
| 4 | PG | Acc | 5 000 000 1 | [inc /s²] Požadovaná akcelerace. |
| 5 | PG | Dec | 5 000 0001 | [inc /s²] Požadovaná dekcelerace. |
| 6 | PG | Mode | 0 | Rychlostní režim. |
| 7 | PG | Type | 1 | Požadovaný typ rampy. Viz Obrázek 1. |
| 8 | PG | PosSpeed | ±1 000 000 1 | [inc /s] Požadovaná rychlost pohybu v pozičním režimu. Po zadání hodnoty a stisknutí klávesy Enter se motor bude točit požadovanou rychlostí. |
Řízení rychlosti motoru (UDP)¶
D-Mode
Popis: Nastavení módu servozesilovače: Profil Generátor – polohový režim.
| Telegram: | Požadavek | |||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 |
| 0x47 | 0x54 | 0x02 | 0x03 | 0x03 | 0x07 | 0x00 | 0x00 | 0x00 |
| Telegram: | Odpověď | (Byte 6, 10 = 0 : žádný Error) | ||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | |||
| 0x47 | 0x54 | 0x02 | 0x03 | 0x03 | 0x00 |
PG – Acc, Dec, PosSpeed, Type, Mode
Popis: Nastavení požadovaného zrychlení, zpomalení, rychlosti, typu ramp (viz obr) a módu Profil Generátoru.
Znaménko u rychlosti PosSpeed rozhoduje o směru otáčení motoru.
| Telegram: | Požadavek | |||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 |
| 0x47 | 0x54 | 0x04 | 0x19 | 0x00 | 0x02 | 0x40 | 0x4B | 0x4C |
| Byte 9 | Byte 10 | Byte 11 | Byte 12 | Byte 13 | Byte 14 | Byte 15 | Byte 16 | Byte 17 |
| 0x00 | 0x40 | 0x4B | 0x4C | 0x00 | 0x02 | 0x19 | 0x08 | 0x40 |
| Byte 18 | Byte 19 | Byte 20 | Byte 21 | Byte 22 | Byte 23 | Byte 24 | Byte 25 | Byte 26 |
| 0x42 | 0x0F | 0x00 | 0x02 | 0x19 | 0x0B | 0x01 | 0x00 | 0x00 |
| Byte 27 | Byte 28 | Byte 29 | Byte 30 | Byte 31 | Byte 32 | Byte 33 | Byte 34 | |
| 0x00 | 0x02 | 0x19 | 0x09 | 0x00 | 0x00 | 0x00 | 0x00 | |
| Telegram: | Odpověď | (Byte 5= 0 : žádný Error) | ||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 |
| 0x47 | 0x54 | 0x04 | 0x19 | 0x00 | 0x00 | 0x02 | 0x02 | 0x19 |
| Byte 9 | Byte 10 | Byte 11 | Byte 12 | Byte 13 | Byte 14 | Byte 15 | Byte 16 | Byte 17 |
| 0x08 | 0x00 | 0x02 | 0x19 | 0x0B | 0x00 | 0x02 | 0x19 | 0x09 |
| Byte 18 | ||||||||
| 0x00 | ||||||||
K – Command
Popis: SW enable.
Po zadání tohoto příkazu je motor pod momentem a zahájí otáčení v požadovaném směru s požadovanou rychlostí.
| Telegram: | Požadavek | |||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 |
| 0x47 | 0x54 | 0x02 | 0x11 | 0x00 | 0x01 | 0x00 | 0x00 | 0x00 |
| Telegram: | Odpověď | (Byte 5 = 0 : žádný Error) | ||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | |||
| 0x47 | 0x54 | 0x02 | 0x11 | 0x00 | 0x00 | |||
SW limity při rychlostním řízení (TGZ GUI)¶
| Krok | Základní skupina | Parametr | Hodnota | Popis |
|---|---|---|---|---|
| 1 | - | - | - | Načíst parametry pohonu. |
| 2 | Drive | D-mode | 7 | Generátor profilů -režim polohy. |
| 3 | Command | K-Command | 1 | SW povolení. Lze jej také zapnout pomocí aktivačního tlačítka na spodní liště. Motor generuje točivý moment. |
| 4 | PG | Acc | 5000000 1 | [inc /s2]Požadovaná akcelerace. |
| 5 | PG | Dec | 5000000 1 | [inc /s2]Požadované zpomalení. |
| 6 | PG | PosSpeed | 1000 000 1 | [inc /s] Požadovaná rychlost pohybu vpozičním režimu. |
| 7 | PG | Mode | 1 | Poziční režim. |
| 8 | PG | Type | 1 | Požadovaný typ rampy |
| 9 | PG | DPosAngle | 0 | [inc]Požadovaná poloha v rozsahu jedné otáčky. Po zadání hodnoty astisknutí klávesy Enter se motor otočí do požadovaného úhlu. |
| 10 | PG | DPosRevol | 0 | [inc]Požadovaná poloha v rozsahu víceotáčkového pohybu. Pozadání hodnoty a stisknutí klávesy Enter se motor otočí do polohy 0. Počkejte, až se motor otočí. |
| 11 | PG | PosSpeed | 0 | [inc /s] Požadovaná rychlost pohybu vpozičním režimu. |
| 12 | PG | Mode | 0 | Rychlostní režim. |
| 13 | PG | PosLimitAnglePosit | 0 1 | Limit kladné polohy v rámci jedné otáčky vrozsahu od -216do 216 |
| 14 | PG | PosLimitRevolPosit | 20 1 | [± počet otáček] Horní mez polohy v rámci otáček v rozsahu od -216do 216 |
| 15 | PG | PosLimitAngleNegat | 0 1 | Limit záporné polohy v rámci jedné otáčky v rozsahu od -216do 216 |
| 16 | PG | PosLimitRevolNegat | -20 1 | [± počet otáček] Dolní mez polohy v rámci otáček v rozsahu od -216do 216 |
| 17 | PG | PosSpeed | ± 5000 000 1 | [inc /s] Po zadání hodnoty se motor bude otáčet rychlostí PosSpeed do polohy PosLimitRevolPosit nebo PosLimitRevolNegat. Směr otáčení je dán znaménkem parametru PosSpeed. |
SW limity při rychlostním řízení (UDP)¶
D-Mode
Popis: Nastavení módu servozesilovače: Profil Generátor – rychlostní režim.
| Telegram: | Požadavek | |||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 |
| 0x47 | 0x54 | 0x02 | 0x03 | 0x03 | 0x07 | 0x00 | 0x00 | 0x00 |
| Telegram: | Odpověď | (Byte 6, 10 = 0 : žádný Error) | ||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | |||
| 0x47 | 0x54 | 0x02 | 0x03 | 0x03 | 0x00 |
PG – Acc, Dec, PosSpeed, Type, Mode, DPosAngle, DPosRevol
Popis: Nastavení požadovaného zrychlení, zpomalení, rychlosti a typu ramp Profil Generátoru.
V posledním kroku je zadána nulová požadovaná poloha (výchozí stav).
| Telegram: | Požadavek | |||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 |
| 0x47 | 0x54 | 0x04 | 0x19 | 0x00 | 0x02 | 0x40 | 0x4B | 0x4C |
| Byte 9 | Byte 10 | Byte 11 | Byte 12 | Byte 13 | Byte 14 | Byte 15 | Byte 16 | Byte 17 |
| 0x00 | 0x40 | 0x4B | 0x4C | 0x00 | 0x02 | 0x1A | 0x07 | 0x00 |
| Byte 18 | Byte 19 | Byte 20 | Byte 21 | Byte 22 | Byte 23 | Byte 24 | Byte 25 | Byte 26 |
| 0x00 | 0x00 | 0x00 | 0x02 | 0x19 | 0x0B | 0x01 | 0x00 | 0x00 |
| Byte 27 | Byte 28 | Byte 29 | Byte 30 | Byte 31 | Byte 32 | Byte 33 | Byte 34 | Byte 35 |
| 0x00 | 0x02 | 0x19 | 0x09 | 0x01 | 0x00 | 0x00 | 0x00 | 0x04 |
| Byte 36 | Byte 37 | Byte 38 | Byte 39 | Byte 40 | Byte 41 | Byte 42 | Byte 43 | Byte 44 |
| 0x19 | 0x04 | 0x02 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 |
| Byte 45 | Byte 46 | |||||||
| 0x00 | 0x00 | |||||||
| Telegram: | Odpověď | (Byte 6, 10, 14, 18, 22 = 0 : no Error) | ||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 |
| 0x47 | 0x54 | 0x04 | 0x19 | 0x00 | 0x00 | 0x02 | 0x02 | 0x19 |
| Byte 9 | Byte 10 | Byte 11 | Byte 12 | Byte 13 | Byte 14 | Byte 15 | Byte 16 | Byte 17 |
| 0x07 | 0x00 | 0x02 | 0x19 | 0x0B | 0x00 | 0x02 | 0x19 | 0x09 |
| Byte 18 | Byte 19 | Byte 20 | Byte 21 | Byte 22 | Byte 23 | |||
| 0x00 | 0x04 | 0x19 | 0x04 | 0x00 | 0x02 | |||
K – Command
Popis: SW enable.
Po zadání tohoto příkazu je motor pod momentem a otočí se do požadované polohy (tj. do polohy 0).
Je nutné vyčkat než se motor dotočí.
| Telegram | Požadavek | |||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 |
| 0x47 | 0x54 | 0x02 | 0x11 | 0x00 | 0x01 | 0x00 | 0x00 | 0x00 |
| Telegram | Odpověď | (Byte 5 = 0 : žádný Error) | ||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | |||
| 0x47 | 0x54 | 0x02 | 0x11 | 0x00 | 0x00 | |||
PG – PosSpeed
Popis: Nastavení požadovanou rychlost na nulovou hodnotu.
| Telegram: | Požadavek | |||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 |
| 0x47 | 0x54 | 0x02 | 0x19 | 0x07 | 0x00 | 0x00 | 0x00 | 0x00 |
| Telegramm | Odpověď | (Byte 5 = 0 : žádný Error) | ||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | |||
| 0x47 | 0x54 | 0x02 | 0x19 | 0x07 | 0x00 | |||
PG – Mode
Popis: Nastavení Profil Generátoru do rychlostního režimu.
| Telegram: | Požadavek | |||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 |
| 0x47 | 0x54 | 0x02 | 0x19 | 0x09 | 0x00 | 0x00 | 0x00 | 0x00 |
| Telegram: | Odpověď | (Byte 5 = 0 : žádný Error) | ||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | |||
| 0x47 | 0x54 | 0x02 | 0x19 | 0x09 | 0x00 | |||
PG – PosLimitAnglePosit, PosLimitRevolPosit, PosLimitAngleNegat, PosLimitRevolNegat
Popis: Nastavení pozičních limitů v rámci jedné otáčky a v rámci více otáček.
| Telegram: | Požadavek | |||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 |
| 0x47 | 0x54 | 0x04 | 0x19 | 0x04 | 0x02 | 0x40 | 0x4B | 0x4C |
| Byte 9 | Byte 10 | Byte 11 | Byte 12 | Byte 13 | Byte 14 | Byte 15 | Byte 16 | Byte 17 |
| 0x00 | 0x40 | 0x4B | 0x4C | 0x00 | 0x04 | 0x1A | 0x04 | 0x02 |
| Byte 18 | Byte 19 | Byte 20 | Byte 21 | Byte 22 | Byte 23 | Byte 24 | Byte 24 | |
| 0x42 | 0x0F | 0x00 | 0x02 | 0x19 | 0x0B | 0x01 | 0x01 | |
| Telegram: | Odpověď | (Byte 5,10 = 0 : žádný Error) | ||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 |
| 0x47 | 0x54 | 0x04 | 0x19 | 0x04 | 0x00 | 0x02 | 0x04 | 0x1A |
| Byte 9 | Byte 10 | Byte 11 | ||||||
| 0x04 | 0x00 | 0x02 | ||||||
PG – PosSpeed
Popis: SW enable.
Po zadání tohoto příkazu je motor pod momentem a provede natočení do požadované polohy z předchozího požadavku.
| Telegram: | Požadavek | |||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 |
| 0x47 | 0x54 | 0x02 | 0x11 | 0x00 | 0x01 | 0x00 | 0x00 | 0x00 |
| Telegram: | Odpověď | (Byte 5 = 0 : žádný Error) | ||||||
| Byte 0 | Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | |||
| 0x47 | 0x54 | 0x02 | 0x11 | 0x00 | 0x00 | |||
Rozšířený popis parametrů Generátoru profilů¶
| Název parametru | Popis |
|---|---|
| Acc | Požadované zrychlení pohonu |
| Dec | Požadované zpomalení pohonu |
| APosAngle | Aktuální pozice pohonu v rámci jedné otáčky |
| APosRevol | Aktuální pozice pohonu v rámci počtu otáček |
| DPosAngle | Požadovaná pozice pohonu v rámci jedné otáčky |
| DPosRevol | Požadovaná pozice pohonu v rámci počtu otáček |
| ASpeed | Aktuální rychlost pohonu |
| PosSpeed | Požadovaná rychlost pohybu v polohovém módu |
| Speed | Požadovaná rychlost pohybu v rychlostním módu |
| Mode | Mód profil generátoru. 0 = rychlostní, 1 = poziční, 2 (onlyread) = signalizace zpomalovací rampy v pozičním módu |
| Rdy | Signalizace dokončení pohybu pohonu. 1 = Poloha byla dosažena |
| Type | Typ profilu rychlosti 0 = harmonické nesymetrické, 1 = harmonické symetrické, 2 = plně harmonické, 3 = lichoběžníkové |
| BitsPerRevol | Počet bitů na otáčku pro profil generátorů |
| RotaryMode | Speciální režim polohování v rámci jedné otáčky s přejezdem kratší cestou - využití pro přímé motory. 1 = Rotary mód, 0 = standardní mód |
| PosOffsetAngle | Poziční offset v rámci jedné otáčky |
| PosOffsetRevol | Poziční offset v rámci počtu otáček |
| PosLimitAnglePosit | Kladný poziční limit v rámci jedné otáčky v rozsahu od -216 do 216 |
| PosLimitRevolPosit | Kladný poziční limit v rámci počtu otáček v rozsahu od -216 do 216 |
| PosLimitAngleNegat | Záporný poziční limit v rámci jedné otáčky v rozsahu od -216 do 216 |
| PosLimitRevolNegat | Záporný poziční limit v rámci počtu otáček v rozsahu od -216 do 216 |
| DPosAngleRotary | V režimu „RotaryMode = 1“ tento parametr určuje požadovanou polohu v rámci jedné otáčky |
| AccMaxCurrentFeedForward | Proudová předkorekce |