Virtuální PLC¶
Popis Virtuálního PLC¶
Modul Virtuální PLC vykonává uživatelem napsaný PLC program.
Ten provádí výpočty, zabezpečuje ovládání servopohonů, načítání a nastavování hodnot vstupů a výstupů a stará se o komunikaci s dalšími periferiemi pouze prostřednictvím sdílené paměti.
Virtuální PLC je z TG Motion periodicky volán v intervalu nastaveném v Cycle_Time.
Velikost Cycle_Time je definována v souboru TGMotion4xx.ini.
Výhodou Virtuálního PLC je jeho rychlost, protože běží přímo ve strojovém kódu CPU.
Upozornění
Skupiny Servo a I/O unifikují ovládací rozhraní pro různé typy servopohonů a I/O jednotek. Stejný PLC kód lze aplikovat na různé servopohony nebo I/O jednotky. Operativně lze také servopohony nebo I/O jednotky měnit, aniž by se musel PLC kód přepisovat.
Tvorba PLC¶
Program PLC je možné vytvářet v obecném vývojovém prostředí, např. Visual Studio, Delphi.
Programovací jazyk může být C, C++ a Pascal.
Ve vývojovém prostředí je třeba vytvořit soubor *.tgm, který musí zveřejnit právě šest funkcí s názvy:
Program_01, Program_02, Program_03, Program_04, Program_05 a Program_Ini.
Uvedené názvy jsou povinné včetně velikosti písmen.
Programový modul *.tgm nesmí být propojen s jakýmikoli externími moduly či knihovnami DLL, veškerá programová funkčnost (funkce, podprogramy, …) musí být vytvořena programátorem přímo v modulu.
Nesmějí se volat jakékoli funkce API Windows, je zakázáno dynamicky alokovat paměť (funkce malloc apod.).
Upozornění
Všechny dále uvedené příklady zdrojových kódů jsou uváděny pro programovací jazyk C/C++.
Vyžadovaný algoritmus PLC¶
Obecný algoritmus PLC vyžaduje následující postup vykonávání, a to přesně v uvedeném pořadí:
-
Načtení vstupů
V první fázi je nutné načíst hodnoty registrů všech požadovaných vstupů. A to jak polohy a stavy servopohonů, tak i hodnoty digitálních a analogových vstupů (viz strukturu Servo a strukturu I/O). -
Zpracování hodnot a výpočty
Dalším krokem je zpracování načtených hodnot a výpočty hodnot nových (žádané polohy servopohonů ahodnoty digitálních a analogových výstupů). -
Nastavení výstupů
Posledním krokem je zaslání žádaných poloh servopohonům a nastavení hodnot digitálních a analogových výstupů prostřednictvím zapsání hodnot do příslušných registrů.
Komunikace s PLC¶
Ostatní komponenty systému TG Motion a uživatelské aplikace běžící pod Windows mohou komunikovat s PLC pomocí sdílené paměti TGM_Data.
TG Motion do ní nijak nezasahuje a její obsah nijak nepřepisuje.
Struktura této paměti a její využití je plně v režii programátora PLC.
Velikost sdílené paměti TGM_Data je obvykle 524 288 byte.
Skutečnou velikost paměti obsahuje registr TGM_System.HEADER.Mem_Size_Data.
Paměť může obsahovat uživatelské registry, data vaček, atd.
Nejčastěji je využívána aplikacemi pro vizualizaci běžícími pod Windows.
Funkce PLC¶
Obecný popis funkcí¶
Programovací modul Virtuálního PLC má k dispozici právě 6 funkcí.
Ty se liší prioritou provádění a požadavkem na své úplné provedení během jednoho Cycle_Time.
Pro správný a bezchybný chod Virtuálního PLC je nutné, aby požadovaný kód byl umístěn v příslušné funkci (viz dále):
- Program_Ini( ) – funkce volaná pouze jednou při spuštění PLC.
- Program_01( ) – nejnižší priorita, volitelná perioda volání.
- Program_02( ) – nižší priorita, volitelná perioda volání.
- Program_03( ) – vyšší priorita, volitelná perioda volání.
- Program_04( ) – nejvyšší priorita, volá se každý Cycle_Time.
- Program_05( ) – nejvyšší priorita, volá se synchronně s výpočtem poloh interpolátoru (vícekrát během jednoho Cycle_Time)
Upozornění
Všechny funkce musejí být implementovány, některé nemusejí obsahovat výkonný kód. Vždy je nutné zabezpečit návratovou hodnotu funkce. Viz příklad kódu funkce Program_02.
Struktura PLC_DATA¶
Struktura slouží pro komunikaci mezi TG Motion a PLC.
TG Motion vytvoří 6 instancí struktury PLC_DATA.
Každá z 6 funkcí (Program_01 – Program_05, Program_Ini) má právě 1 parametr, ukazatel na strukturu PLC_DATA.
Při volání funkce jí TG Motion předá ukazatel na jí náležející instanci struktury.
Struktura PLC_DATA obsahuje ukazatele na sdílené paměti a ukazatele na vnitřní diagnostické funkce TG Motion.
Definice diagnostických funkcí¶
#ifdef __cplusplus
extern "C" {
#endif
typedef int _cdecl RTWPRINTF_STRING(LPCWSTR strText); // výpis řetězce do konzole
typedef int _cdecl RTWPRINTF_LONG(LPCWSTR strFormat, long lVal);
// výpis hodnoty proměnné lVal do konzole
typedef int __cdecl SWPRINTF(wchar_t *buffer, size_t sizeOfBuffer, const wchar_t *strFormat, ...);
// zápis formátovaného textu do řetězce buffer
typedef void __cdecl SLEEPFT(PLARGE_INTEGER Pause); // čekání
typedef BOOL __cdecl CAN_TRANSMIT(ULONG Number, ULONG Id, ULONG Dlc, PUCHAR Tx_Data ); // rezervováno
typedef BOOL __cdecl CAN_TRANSMITREMOTE(ULONG Number, ULONG Id, ULONG Dlc, PUCHAR Tx_Data); // rezervováno
typedef int __cdecl RTWPRINTF_EX(int severity, const wchar_t *strFormat, ...);
// výpis formátovaného textu do konzole
#ifdef __cplusplus
};
#endif
Ukazatele na diagnostické funkce¶
typedef struct _PLC_IMPORT_FUNCTIONS
{
RTWPRINTF_STRING *pRtWprintf_String;
RTWPRINTF_LONG *pRtWprintf_Long;
SWPRINTF *pswprintf;
SLEEPFT *pSleepFt;
CAN_TRANSMIT *pCAN_Transmit;
CAN_TRANSMITREMOTE *pCAN_TransmitRemote;
RTWPRINTF_EX *pRtWprintf_Ex;
} PLC_IMPORT_FUNCTIONS;
Vlastní struktura PLC_DATA¶
typedef struct _PLC_DATA
{
size_t structSize; // velikost struktury v bytech
void *PSystem_Memory; // ukazatel na sdílenou paměť TGM_System
void *PData_Memory; // ukazatel na sdílenou paměť TGM_Data
void *POsc_Memory; // ukazatel na sdílenou paměť TGM_Oscilloscope
void *PCam_Memory; // ukazatel na sdílenou paměť TGM_Cam_Profile
void *PServo_Memory; // ukazatel na sdílenou paměť TGM_Servo
void *PDio_Memory; // ukazatel na sdílenou paměť TGM_Dio
void *PInterpolator_Memory; // ukazatel na sdílenou paměť TGM_Interpolator
void *Pointer_interpolator_params; // ukazatel na sdílenou paměť TGM_InterpolatorWriteMemory
void *Pointer_interpolator_get_position; // ukazatel na sdílenou paměť TGM_InterpolatorReadMemory
void *PCNCEx; // ukazatel na sdílenou paměť TGM_CNCEX
void *PGCode; // ukazatel na sdílenou paměť TGM_GCODE
void *PReserve3_Memory; // rezervováno
void *PReserve4_Memory; // rezervováno
void *PReserve5_Memory; // rezervováno
void *PReciveDataCan1; // rezervováno
void *PReciveDataCan2; // rezervováno
PLC_IMPORT_FUNCTIONS functions; // struktura s ukazateli na diagnostické funkce
} PLC_DATA, *PPLC_DATA;
Funkce podle priority¶
V této kapitole jsou funkce řazeny od nejnižší priority po prioritu nejvyšší.
U funkce Program_Ini se o prioritu v pravém slova smyslu nejedná.
Tato funkce je volána pouze jednou při spuštění Virtuálního PLC.
Program_Ini¶
Deklarace: long Program_Ini(PLC_DATA *pData)
Tato funkce je volaná jen jednou, a to při spuštění Virtuálního PLC.
Slouží zejména k inicializaci proměnných Virtuálního PLC.
Výkonný kód funkce Program_Ini nesmí být prázdný.
Délka vykonávání funkce není omezena.
Upozornění
Při startu Virtuálního PLC (v těle funkce Program_Ini) je vhodné zkontrolovat verze PLC a TG Motion.
Návratové hodnoty funkce
- 0 – chyba (spouštění PLC se zastaví; uživatel musí chybu vyřešit a znovu spustit PLC).
- 1 – funkce proběhla v pořádku.
Upozornění
Při nahrání Virtuálního PLC se neinicializují hodnoty globálních proměnných, nevolají se konstruktory globálních objektů.
Inicializaci je nutné provést ve funkci Program_Ini.
Ukázka zdrojového kódu
long Program_Ini(PLC_DATA *pData)
{
if (pData == NULL || pData->structSize != sizeof(PLC_DATA)) return 0;
if (pData->functions.pRtWprintf_Long == NULL) return 0;
if (pData->functions.pRtWprintf_String == NULL) return 0;
if (pData->functions.pswprintf == NULL) return 0;
if (pData->functions.pSleepFt == NULL) return 0;
if (pHeader->Compatibility_Id != ID_COMPATIBILITY)
{
pData->functions.pswprintf(info_ini, SIZE_INFO, L"Error start of PLC PLC_COMPABILITY_ID = %d
TGM_COMPABILITY_ID = %d \n", ID_COMPATIBILITY, pHeader->Compatibility_Id);
pData->functions.pRtWprintf_String(info_ini);
return 0;
}
//****************************************** Update PLC Version ***********************************
Verze_PLC = Get_Version(PLC_VERSION);
//*************************************************************************************************
return 1;
}
Program_01¶
Deklarace: long Program_01(PLC_DATA *pData)
Funkce je z TG Motion volána s periodou danou v konfiguračním souboru TGMotion4xx.ini.
Perioda je definována položkou Cycle_Time_Program_01, její hodnota se pohybuje v rozmezí 100–10000 μs (horní hranice není omezena).
Délka vykonávání funkce by neměla přesáhnout 20 % Cycle_Time_Program_01, aby zbyl čas na vykonání funkcí Program_02 a Program_03.
Tato funkce se nejčastěji používá pro základní obsluhu zařízení, která nemusejí být obsluhována pravidelně každý Cycle_Time.
Funkce Program_01 má nejnižší prioritu a kdykoli může být přerušena funkcemi Program_02, Program_03, Program_04 a Program_05.
Program_02¶
Deklarace: long Program_02(PLC_DATA *pData)
Funkce je z TG Motion volána s periodou danou v konfiguračním souboru TGMotion4xx.ini.
Perioda je definována položkou Cycle_Time_Program_02, její hodnota se pohybuje v rozmezí 100–10000 μs (horní hranice není omezena).
Délka vykonávání funkce by neměla přesáhnout 20 % Cycle_Time_Program_02, aby zbyl čas na vykonání funkcí Program_01 a Program_03.
Tato funkce se většinou implementuje jako prázdná funkce.
Funkce Program_02 má nízkou prioritu a může být kdykoli přerušena funkcemi Program_03, Program_04, a Program_05.
Ukázka zdrojového kódu
Program_03¶
Deklarace: long Program_03(PLC_DATA *pData)
Funkce je z TG Motion volána s periodou danou v konfiguračním souboru TGMotion4xx.ini.
Perioda je definována položkou Cycle_Time_Program_03, její hodnota se pohybuje v rozmezí 100–10000 μs (horní hranice není omezena).
Délka vykonávání funkce by neměla přesáhnout 20 % Cycle_Time_Program_03, aby zbyl čas na vykonání funkcí Program_01 a Program_02.
Tato funkce se většinou implementuje jako prázdná funkce.
Funkce Program_03 má nízkou prioritu a může být kdykoli přerušena funkcemi Program_04 a Program_05.
Ukázka zdrojového kódu
Program_04¶
Deklarace: long Program_04(PLC_DATA *pData)
Funkce je z TG Motion volána synchronně s komunikací v rámci Cycle_Time, tedy jednou během každého Cycle_Time.
Ten je definován v souboru TGMotion4xx.ini položkou Cycle_Time (250 μs, 500 μs, 1000 μs).
Funkce Program_04 se nejčastěji používá pro modifikaci žádané polohy servopohonů a obsluhu I/O jednotek.
Má nejvyšší prioritu (stejně jako funkce Program_05) a vždy se vykoná celá bez přerušení.
Délka vykonávání funkce Program_04 nesmí přesáhnout 10 % Cycle_Time, aby byla zabezpečena časová přesnost komunikace se servopohony a I/O jednotkami.
Upozornění
Ve funkci Program_04 nesmí být volána funkce SleepFt
Program_05¶
Deklarace: long Program_05(PLC_DATA *pData)
Funkce je z TG Motion volána synchronně s interpolátorem, tedy několikrát během každého Cycle_Time.
Funkce Program_05 se nejčastěji používá pro modifikaci polohy vypočtené modulem interpolátoru.
Má nejvyšší prioritu (stejně jako funkce Program_04) a vždy se vykoná celá bez přerušení.
Délka vykonávání funkce Program_05 nesmí přesáhnout 10 μs, aby byla zabezpečena časová přesnost komunikace se servopohony a I/O jednotkami.
Upozornění
Ve funkci Program_05 nesmí být volána funkce SleepFt
Časová souslednost volání funkcí¶
Cycle_Time = 250 μs
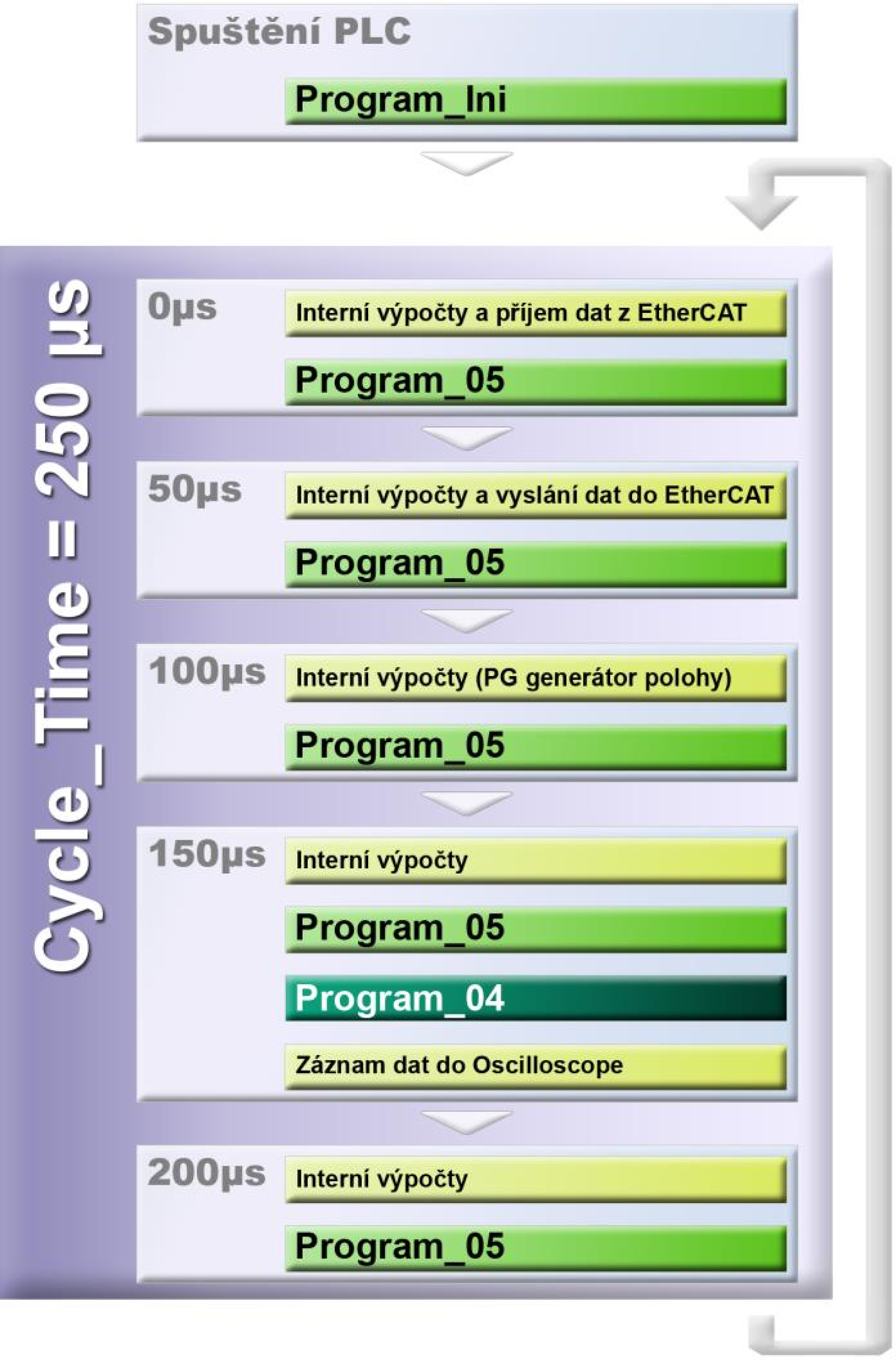
Po spuštění PLC a úspěšném vykonání funkce Program_Ini se spustí cyklické volání smyčky trvající 250 μs.
Ta je rovnoměrně rozdělena na 5 stejných časových úseků volaných pravidelně každých 50 μs.
-
Čas 0 μs
Provedou se potřebné interní výpočty a přijmou se data z EtherCAT. Poté se zavolá funkce Program_05, která se vykoná celá bez přerušení. -
Čas 50 μs Provedou se potřebné interní výpočty a pošlou se data do EtherCAT. Poté se zavolá funkce Program_05, která se vykoná celá bez přerušení.
-
Čas 100 μs Provedou se potřebné interní výpočty a vypočtou se data žádané polohy pomocí PG generátorů. Poté se zavolá funkce Program_05, která se vykoná celá bez přerušení.
-
Čas 150 μs Provedou se potřebné interní výpočty a zavolá se funkce Program_05, která se vykoná celá bez přerušení. Poté se zavolá funkce Program_04, která se také vykoná celá bez přerušení. Nakonec se zaznamenají všechna data potřebná pro Oscilloscope.
-
Čas 200 μs Provedou se potřebné interní výpočty a zavolá se funkce Program_05, která se vykoná celá bez přerušení.
Pokud je během kteréhokoli cyklu volná výpočetní kapacita, jsou v případě potřeby obsluhovány funkce Program_01, Program_02 a Program_03.
Cycle_Time = 500 μs
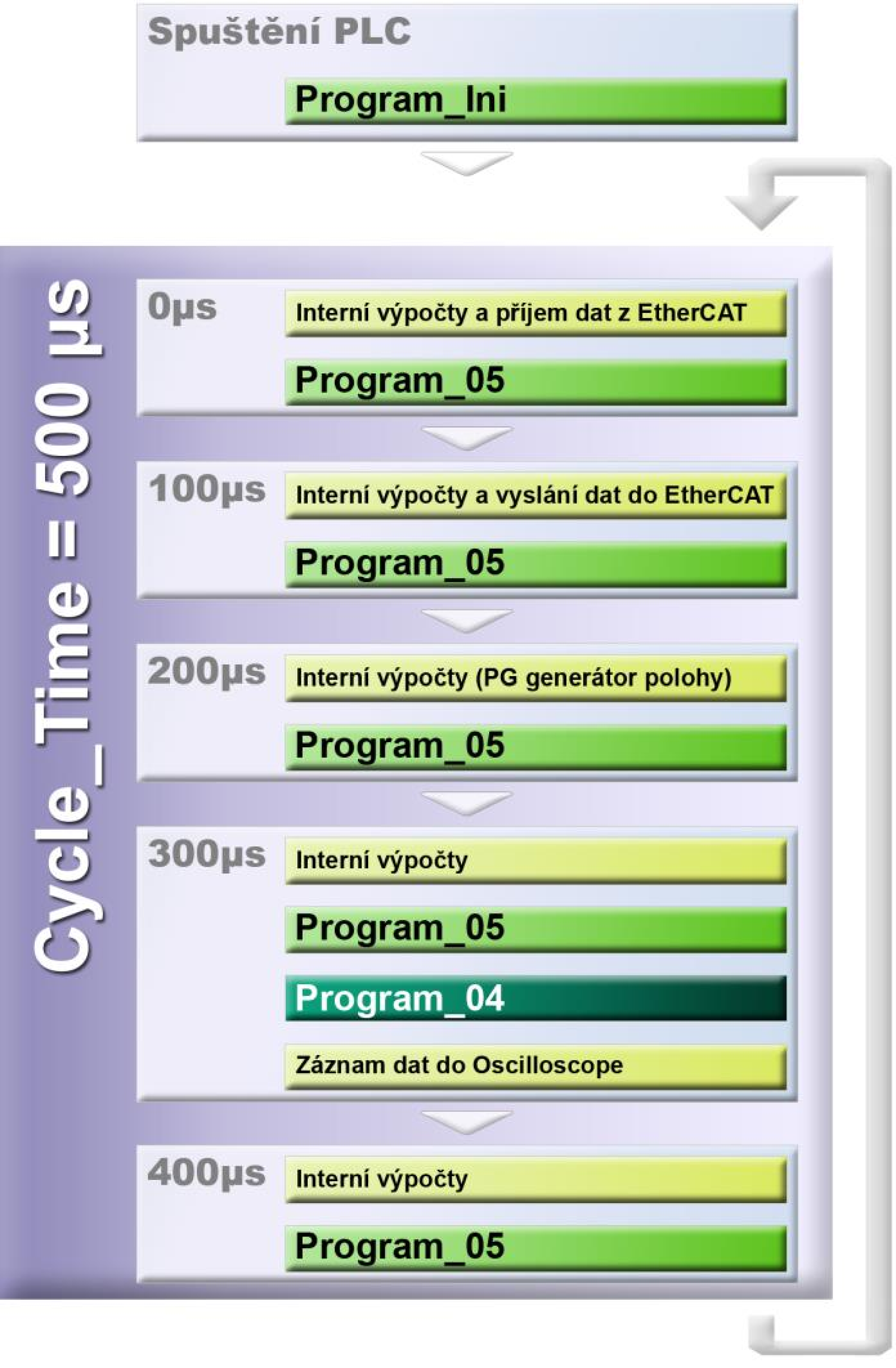
Po spuštění PLC a úspěšném vykonání funkce Program_Ini se spustí cyklické volání smyčky trvající 500 μs.
Ta je rovnoměrně rozdělena na 5 stejných časových úseků volaných pravidelně každých 100 μs.
-
Čas 0 μs Provedou se potřebné interní výpočty a přijmou se data z EtherCAT. Poté se zavolá funkce Program_05, která se vykoná celá bez přerušení.
-
Čas 100 μs Provedou se potřebné interní výpočty a pošlou se data do EtherCAT. Poté se zavolá funkce Program_05, která se vykoná celá bez přerušení.
-
Čas 200 μs Provedou se potřebné interní výpočty a vypočtou se data žádané polohy pomocí PG generátorů. Poté se zavolá funkce Program_05, která se vykoná celá bez přerušení.
-
Čas 300 μs Provedou se potřebné interní výpočty a zavolá se funkce Program_05, která se vykoná celá bez přerušení. Poté se zavolá funkce Program_04, která se také vykoná celá bez přerušení. Nakonec se zaznamenají všechna data potřebná pro Oscilloscope.
-
Čas 400 μs Provedou se potřebné interní výpočty a zavolá se funkce Program_05, která se vykoná celá bez přerušení. Pokud je během kteréhokoli cyklu volná výpočetní kapacita, jsou v případě potřeby obsluhovány funkce Program_01, Program_02 a Program_03.
Cycle_Time = 1000 μs
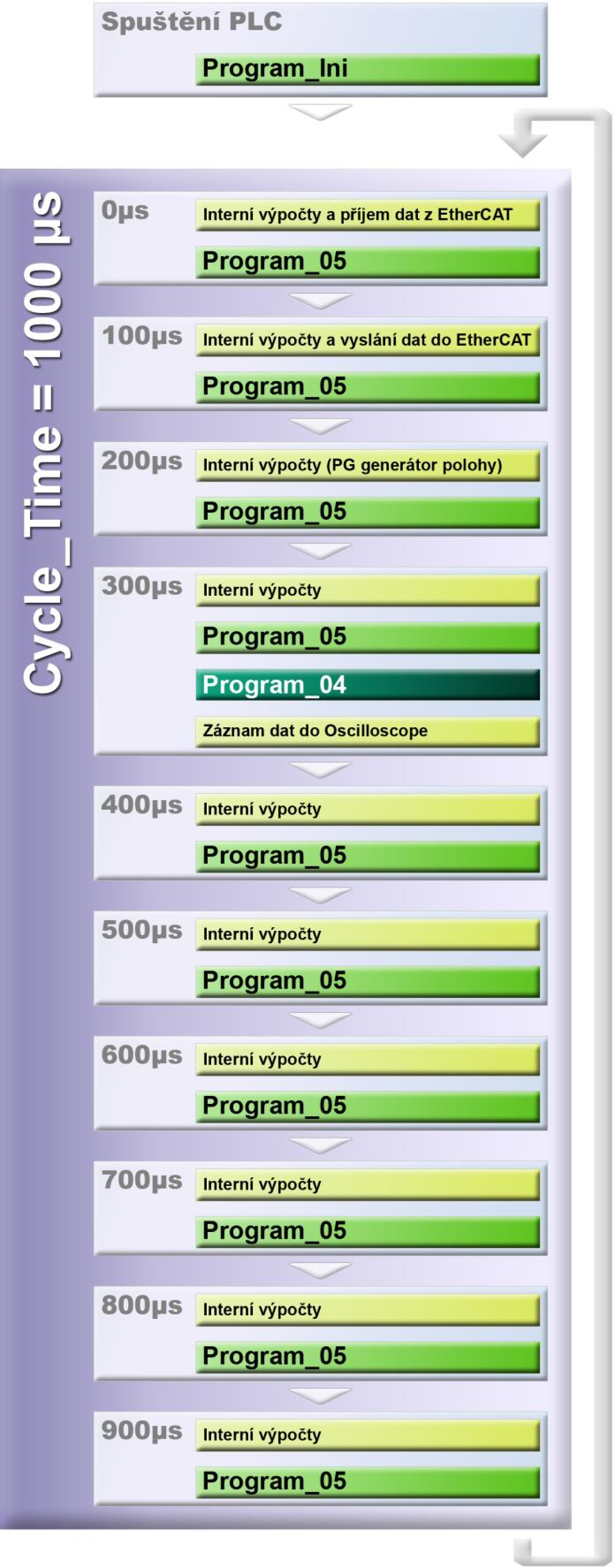
Po spuštění PLC a úspěšném vykonání funkce Program_Ini se spustí cyklické volání smyčky trvající 1000 μs.
Ta je rovnoměrně rozdělena na 10 stejných časových úseků volaných pravidelně každých 100 μs.
-
Čas 0 μs Provedou se potřebné interní výpočty a přijmou se data z EtherCAT. Poté se zavolá funkce Program_05, která se vykoná celá bez přerušení.
-
Čas 100 μs Provedou se potřebné interní výpočty a pošlou se data do EtherCAT. Poté se zavolá funkce Program_05, která se vykoná celá bez přerušení.
-
Čas 200 μs Provedou se potřebné interní výpočty a pošlou se data do EtherCAT. Poté se zavolá funkce Program_05, která se vykoná celá bez přerušení.
-
Čas 300 μs Provedou se potřebné interní výpočty a zavolá se funkce Program_05, která se vykoná celá bez přerušení. Poté se zavolá funkce Program_04, která se také vykoná celá bez přerušení. Nakonec se zaznamenají všechna data potřebná pro Oscilloscope.
-
Čas 400 μs, 500 μs, 600 μs, 700 μs, 800 μs, 900 μs Ve všech těchto časových úsecích se provedou potřebné interní výpočty a zavolá se funkce Program_05, která se vykoná celá bez přerušení. Pokud je během kteréhokoli cyklu volná výpočetní kapacita, jsou v případě potřeby obsluhovány funkce Program_01, Program_02 a Program_03.
Nástroje pro ladění PLC¶
Control Observer¶
Hlavním nástrojem pro ladění Virtuálního PLC z prostředí Windows je Control Observer. Je dodáván se systémem TG Motion.
Jedná se o soubor utilit vyvinutý pro diagnostiku systému TG Motion, odlaďování PLC a obslužných Windows aplikací.
Control Observer obsahuje nástroje pro přímé testování a ovládání servopohonů, načtení a spuštění PLC kódu a zobrazení parametrů systémového časovače.
Další skupina utilit slouží k zobrazování, sledování, či změně zvolených registrů sdílené paměti.
Control Observer je samostatně spustitelný program Control_Observer_II.exe bez nutnosti instalace, který se dodává s 3 knihovnami:
TGM_Comm_Int_2.dll– zabezpečuje komunikaci s TG Motion běžícím na stejném počítači.TGM_Mini.dll– obsluhuje TG Motion běžící v TGMmini.TGM_Remote.dll– umožňuje spojení pomocí sítě LAN s TG Motion běžícím na jiném počítači
Upozornění
Pro přístup k datům sdílené paměti TGM_Data slouží v utilitě Select Registers záložka Free Registers, typ paměti DAT.
Součásti Control Observeru
- Servo Tester – utilita k testování a ovládání servopohonů.
- PLC Loader – slouží k načtení PLC a jeho spuštění.
- System Timer – zobrazuje aktuální vytížení CPU jednotlivými procesy TG Motion.
- Oscilloscope – slouží ke grafickému zobrazování hodnot vybraných registrů v závislosti na čase.
- Graphic Viewer – používá se ke grafickému zobrazení kontinuální řady vybraných registrů.
Upozornění
Pro podrobnější popis viz kapitolu Control Observer.
Výpisy¶
Pro výpisy do konzole RTX Server se používají diagnostické funkce ze struktury PLC_DATA.
Jedná se o 3 typy diagnostických funkcí:
– výpis řetězce do konzole – výpis hodnoty proměnné lVal (hodnota typu long) do konzole – výpis formátovaného textu do konzole
Oscilloscope¶
Oscilloscope je samostatná utilita běžící v TG Motion.
Slouží k zachycení hodnot požadovaných registrů v přesném časovém intervalu Cycle_Time a jejich ukládání do sdílené paměti TGM_Oscilloscope.
To se děje ihned po vykonání funkce Program_04.
O zobrazení zachycených dat a nastavení parametrů ovlivňujících zaznamenávání hodnot se stará utilita Oscilloscope v Control Observeru.
Upozornění
Pro podrobnější popis viz kapitolu Oscilloscope.
Aplikace Windows¶
Přístup do sdílených pamětí mají také aplikace běžící pod operačním systémem Windows. Jejich prostřednictvím lze číst hodnoty registrů, případně je i měnit.
Upozornění
TG Motion běží v real-time prostředí, tedy s vyšší prioritou, než mají procesy běžící pod systémem Windows. Z Windows aplikací tedy nelze zajistit bezeztrátové zachycení všech potřebných hodnot, případně operativní reakci na nastalé situace.