Zpětná vazba FB1, FB2
Základní popis¶
Servozesilovač TGZ obsahuje ve standardním provedení (UNI) na konektoru X6 a X7 obvody pro připojení zpětné vazby pro osu 1, resp. osu 2. Je možné připojit zpětnou vazbu typu Endat, SSI, BISS, inkrementální enkodér a po aplikaci propojky FBSELx také Hiperface DSL.
Zjednodušené vnitřní schéma zapojení je na obrázku níže.

Jedná se o 2 velmi rychlé budiče sběrnice RS485 schopné pracovat s datovým tokem až 20 Mbit/s.
Délka kabelu
Maximální přenosová rychlost klesá s délkou zpětnovazebního kabelu. V rámci zvýšení odolnosti zařízení proti rušení se ujistěte, že používáte originální kabel vhodné délky. Zbytečně dlouhý kabel (rezervní smyčky/klubka) může zapříčinit snížení odolnosti zařízení.
Každá linka RS485 je interně symetricky zakončena odporem 112 Ω. Dále je zde soufázová tlumivka pro větší odolnost komunikace vůči rušení. Konektor X6 a X7 je reprezentován piny 1-8.
Firmware
Ujistěte se, že pro zvolený typ zpětné vazby používáte správný firmware. Kontaktujte dodavatele pro další podrobnosti.
Podporované polohové snímače¶
Hiperface DSL¶
 je čistě digitální protokol, vyžadující minimální počet vodičů mezi servozesilovačem a motorem.
Robustnost tohoto protokolu umožňuje použití jednokabelového motoru, tj. výkonové i datové vodiče jsou v jednom kabelu.
Přenáší se pouze digitální absolutní poloha bez jakýchkoliv analogových signálů. Napájení i data jsou přenášeny pomocí jednoho páru vodičů.
Snímače se vyrábějí s rozlišením 15 až 24 bitů na otáčku (více-otáčkové provedení – 4 096 otáček).
Tento typ zpětné vazby se používá u motorů s jedním konektorem nebo kabelem.
je čistě digitální protokol, vyžadující minimální počet vodičů mezi servozesilovačem a motorem.
Robustnost tohoto protokolu umožňuje použití jednokabelového motoru, tj. výkonové i datové vodiče jsou v jednom kabelu.
Přenáší se pouze digitální absolutní poloha bez jakýchkoliv analogových signálů. Napájení i data jsou přenášeny pomocí jednoho páru vodičů.
Snímače se vyrábějí s rozlišením 15 až 24 bitů na otáčku (více-otáčkové provedení – 4 096 otáček).
Tento typ zpětné vazby se používá u motorů s jedním konektorem nebo kabelem.
V případě, že požadujeme tento typ zpětné vazby, je potřeba na servozesilovači TGZ propojit piny 1-3 a 2-4 konektoru X6, resp. X7. Tím se propojí signál RS_485_2 s výstupním obvodem pro napájení linky. Poté stačí připojit vhodný snímač na piny 7-8.

Příklady propojení servozesilovače a motoru jsou k dispozici v sekci Ostatní | Schémata kabelů
- Připojení motoru s konektorem ITEC
- Připojení motoru s konektorem 08p
- Připojení motoru s konektorem CSTA 8p
- Připojení motoru v kabelovém provedení (kabely volně)
Endat 2.2¶
 je čistě digitální protokol, vyžadující 6 vodičů (3 páry) mezi servozesilovačem a motorem.
Jedná se o diferenciální páry pro clock, data (synchronní) a jeden pár pro napájení (+12V).
Nepoužívá se tak obvod pro přenos napájení po datovém páru, jako u Hiperface DSL.
Přenáší se pouze digitální absolutní poloha bez jakýchkoliv analogových signálů.
Snímače se vyrábějí s rozlišením 18 až 25 bitů na otáčku (více-otáčkové provedení – 4 096 otáček).
je čistě digitální protokol, vyžadující 6 vodičů (3 páry) mezi servozesilovačem a motorem.
Jedná se o diferenciální páry pro clock, data (synchronní) a jeden pár pro napájení (+12V).
Nepoužívá se tak obvod pro přenos napájení po datovém páru, jako u Hiperface DSL.
Přenáší se pouze digitální absolutní poloha bez jakýchkoliv analogových signálů.
Snímače se vyrábějí s rozlišením 18 až 25 bitů na otáčku (více-otáčkové provedení – 4 096 otáček).
V případě, že požadujeme tento typ zpětné vazby, je potřeba k servozesilovači připojit na konektor X6, resp. X7 všechny výše zmíněné signály.
Příklady propojení servozesilovače a motoru jsou k dispozici v sekci Ostatní | Schémata kabelů
- Připojení motoru s konektorem ITEC
- Připojení motoru s konektorem 12p
- Připojení motoru v kabelovém provedení (kabely volně)
BISS-C¶
 je čistě digitální protokol, vyžadující 6 vodičů (3 páry) mezi servozesilovačem a motorem.
Jedná se o diferenciální páry pro clock, data (synchronní) a jeden pár pro napájení (+5V nebo +12V).
Nepoužívá se tak obvod pro přenos napájení po datovém páru, jako u Hiperface DSL.
Přenáší se pouze digitální absolutní poloha bez jakýchkoliv analogových signálů.
je čistě digitální protokol, vyžadující 6 vodičů (3 páry) mezi servozesilovačem a motorem.
Jedná se o diferenciální páry pro clock, data (synchronní) a jeden pár pro napájení (+5V nebo +12V).
Nepoužívá se tak obvod pro přenos napájení po datovém páru, jako u Hiperface DSL.
Přenáší se pouze digitální absolutní poloha bez jakýchkoliv analogových signálů.
V případě, že požadujeme tento typ zpětné vazby, je potřeba k servozesilovači připojit na konektor X6, resp. X7 všechny výše zmíněné signály. Pokud je snímač typu s napájením (+5V) je potřeba připojit napájecí vodiče do konektoru X5 na příslušné vývody.
Příklady propojení servozesilovače a motoru jsou k dispozici v sekci Ostatní | Schémata kabelů
- Připojení snímače SSI/BISS s napájením +12V
- Připojení snímače SSI/BISS s napájením +5V - volné vývody
- Připojení snímače SSI/BISS v kabelovém provedení a napájení +5V
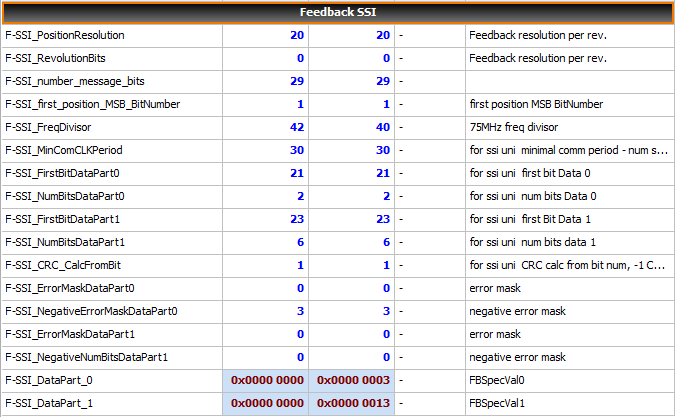
Níže najdete příklad nastavení parametrů polohový snímač RLS AksIM-2, 20 bitů, snímač polohy MB053DCC20BEDT00.

CDS bit
Bit CDS je pro ostatní parametry považován za bit č. 0 zprávy.
Popis parametrů
F-Type- 6 .. Biss kodér, 7 .. SSI kodérF-SSI_PositionResolution- počet bitů polohy ve zprávě =resolutionF-SSI_RevolutionBits- počet bitů pro počítání otáček v případě víceotáčkových snímačůF-SSI_number_message_bits- počet bitů celé zprávy. V případě Biss-C bez start bitu.F-SSI_first_position_MSB_BitNumber- číslo bitu prvního bitu obsahujícího polohu. Počáteční bit se nepočítá (není součástí).F-SSI_FreqDivisor- dělitel komunikační frekvence. Výpočet F = 75Mhz / F-SSI_FreqDivisorF-SSI_MinComCLKPeriod- minimální perioda dotazování na polohu. Uvádí se v počtu clock period. Je to parametr pro senzory, které nejsou schopny dosáhnout maximální (možné) frekvence.F-SSI_FirstBitDataPart0- číslo bitu prvního bitu volitelné datové části telegramu 0. Počáteční bit se nepočítá (není součástí).F-SSI_NumBitsDataPart0- délka volitelné části DATA 0.F-SSI_FirstBitDataPart1- číslo bitu prvního bitu volitelné části DATA telegramu 1. Počáteční bit se nepočítá (není součástí).F-SSI_NumBitsDataPart1- délka nepovinné části DATA 1.F-SSI_CRC_CalcFromBit- číslo bitu prvního bitu, ze kterého se počítá CRC. Pokud je nastaveno -1, CRC se nevypočítává. Délka CRC musí být 6 bitů na konci zprávy. Polynom x6 +x1 +x0.F-SSI_ErrorMaskDataPart0,F-SSI_ErrorMaskDataPart1- Masky pro zpětnou indikaci chyby. Pokud je nastavený bit v Masce shodný s odpovídajícím bitem v F-SSI_DataPart_x, je indikována chyba zpětné vazby.F-SSI_NegativeErrorMaskDataPart0,F-SSI_NegativeErrorMaskDataPart1- Masky pro indikaci chyby zpětné vazby. Pokud je nastavený bit v masce totožný s odpovídajícím invertovaným bitem v F-SSI_DataPart_x, je indikována chyba zpětné vazby.
Chyba zpětné vazby
Pro indikaci chyby zpětné vazby je nutné správně nastavit odpovídající parametry F-SSI_FirstBitDataPartx a F-SSI_NumBitsDataPartx a tato funkce musí být čidlem podporována.
Nastavené parametry
Některé parametry jsou akceptovány ihned po nastavení, ale doporučuje se je uložit a restartovat TGZ.
Acuro AD37¶
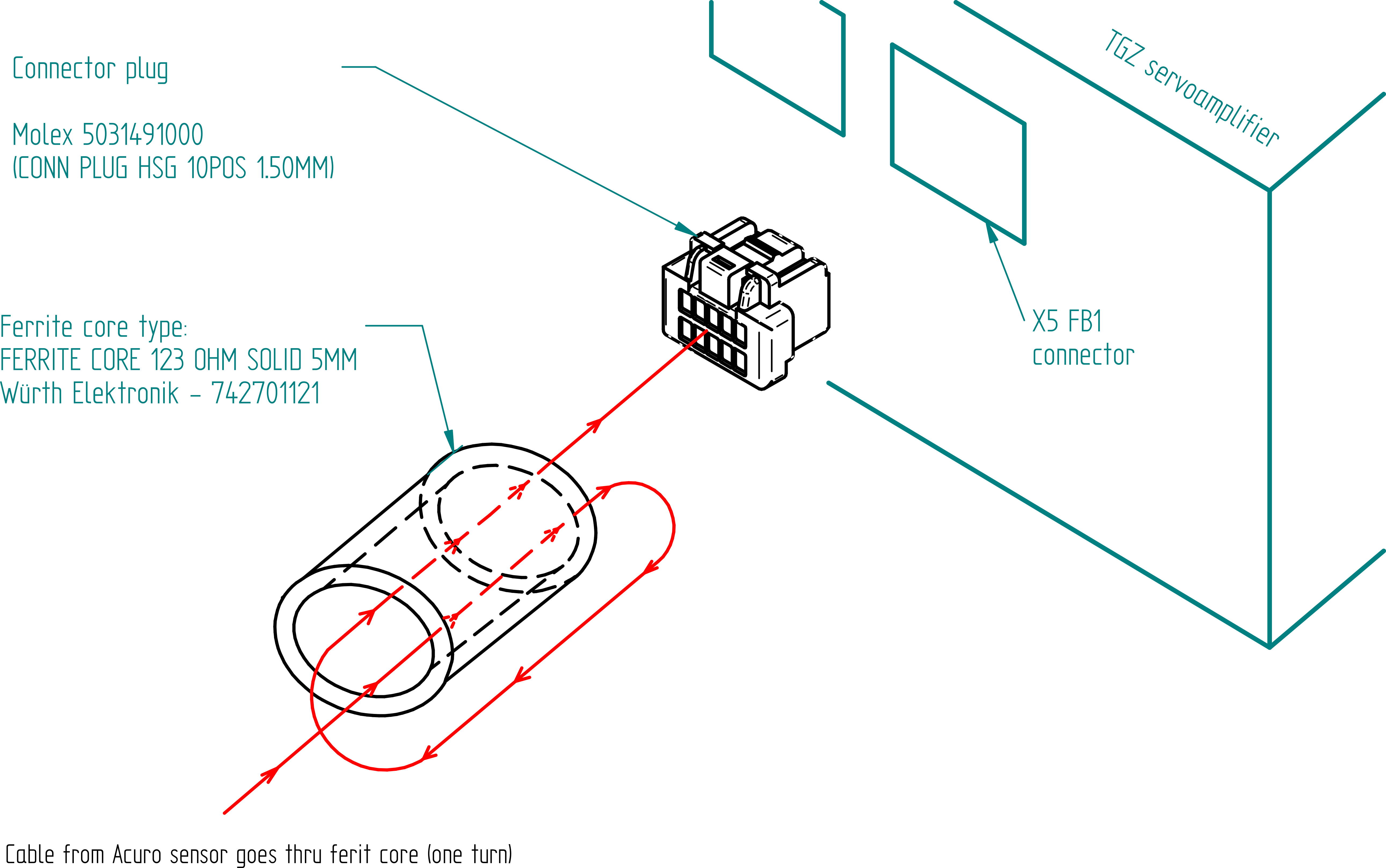
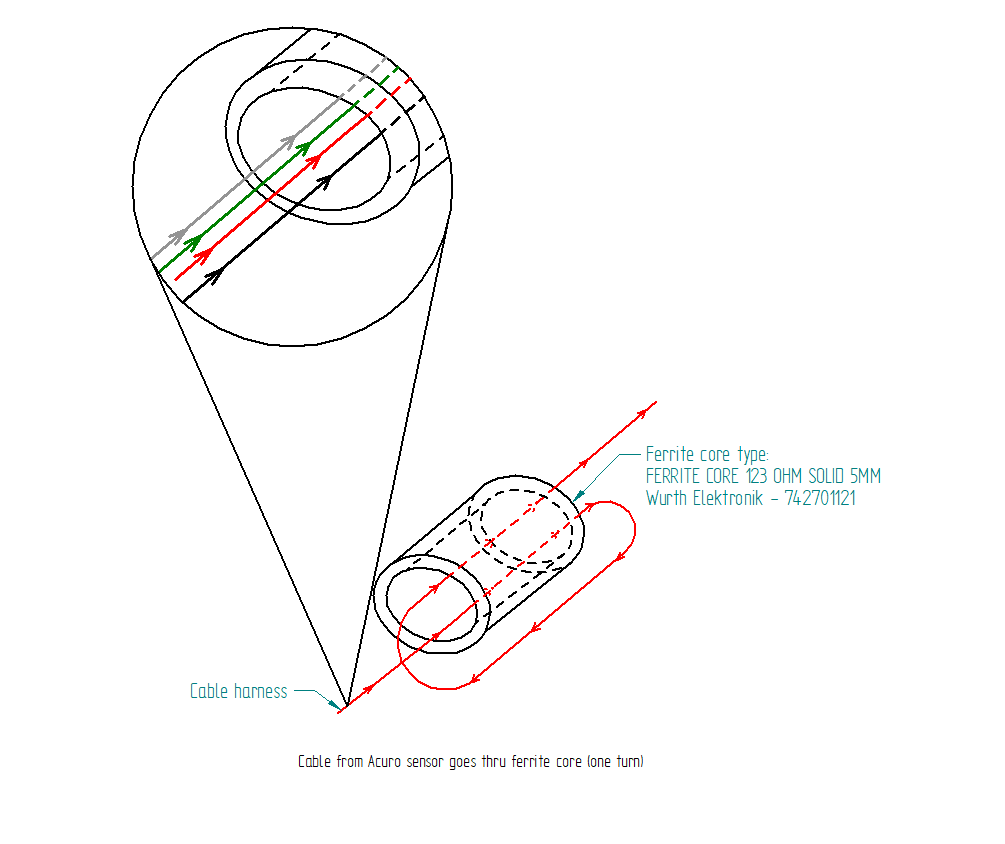
V závislosti na verzi firmware servozesilovače TGZ je možné na vybraných verzích -RI použít absolutní snímač polohy typu Hengstler Acuro AD37 s rozhraním ACURO® link (4 vodičové: 2 × napájení + 2 × data). Jedná se o jednootáčkové (singleturn) a víceotáčkové (multiturn) snímače polohy vhodné pro jednokabelové řešení. Mají vstup pro snímač teploty motoru (např. PT1000). Rozlišení až 20 bitů singleturn + 12 bitů multiturn, Široký provozní teplotní rozsah (-40°C ~ +115°C) a až 12 000 ot./min při kontinuálním provozu. Datové parametry enkodéru uložené v elektronickém datovém listu (EDS) uvnitř enkodéru. Rozhraní Hengstler ACURO secure bylo navrženo speciálně pro zajištění vysoké úrovně funkční bezpečnosti (SIL) v řízení servo pohonů. Rozhraní splňuje požadavky SIL3, přičemž samotný enkodér AD37S splňuje požadavky na SIL2 a enkodér AD37E splňuje požadavky na SIL3.
U tohoto snímače doporučuje použít dodatečnou filtraci datové komunikace feritovým kroužkem. V tomto případě vytvořte jeden závit všemi vodiči přes feritový kroužek: