TGZ a TwinCAT
- Použijte nejnovější soubor EtherCAT XML pro TGZ a zkopírujte jej do složky TwinCAT (
TwinCAT\3.1\Config\Io\EtherCAT). - Vytvořte nový projekt\
- Připojte TGZ k síti EtherCAT
- Nastavte registr
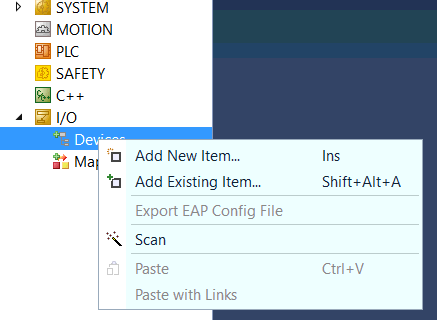
D-Modeservozesilovače TGZ na hodnotu 3 (režim polohy). Proveďte to pro první nebo obě osy (verze pohonu TGZ-D). V případě potřeby nastavení uložte. - Použijte příkaz Scan v kontextové nabídce
I/O | Zařízení
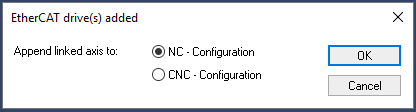
- Připojte pohon ke konfiguraci NC-Configuration
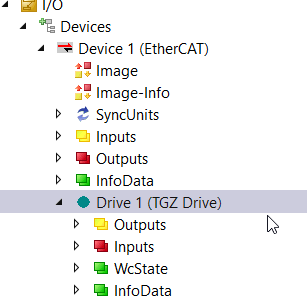
- Dvojklikem na položku TGZ Drive ve stromu zařízení se otevře okno vlastností.
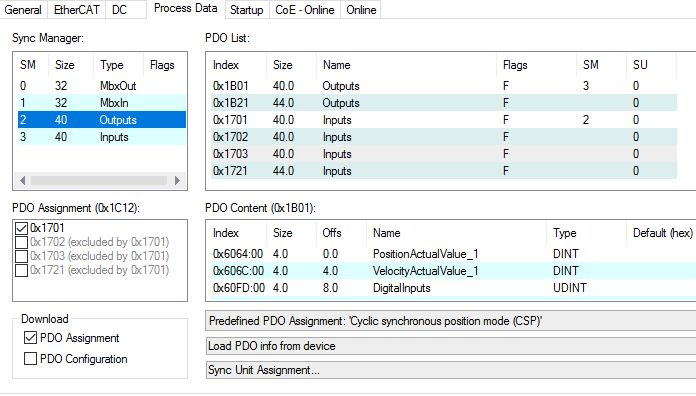
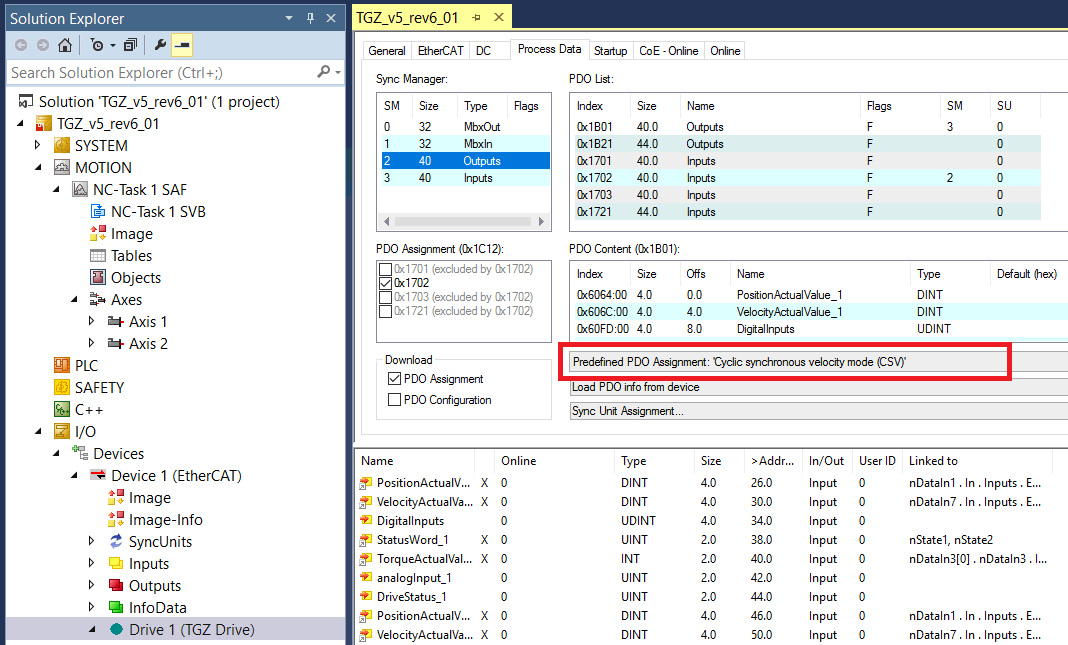
- PDO lze sledovat a měnit v kartě Process Data. Na obrázku níže je zobrazeno nastavení pro režim CST.
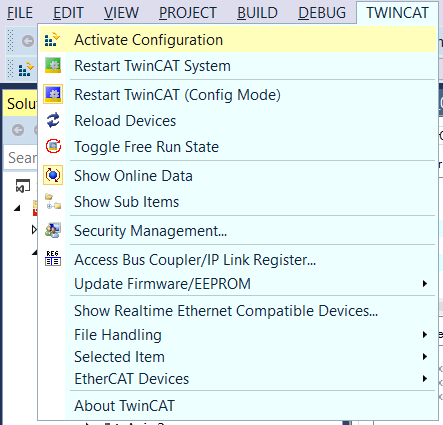
- Po dokončení nastavení aktivujte konfiguraci.
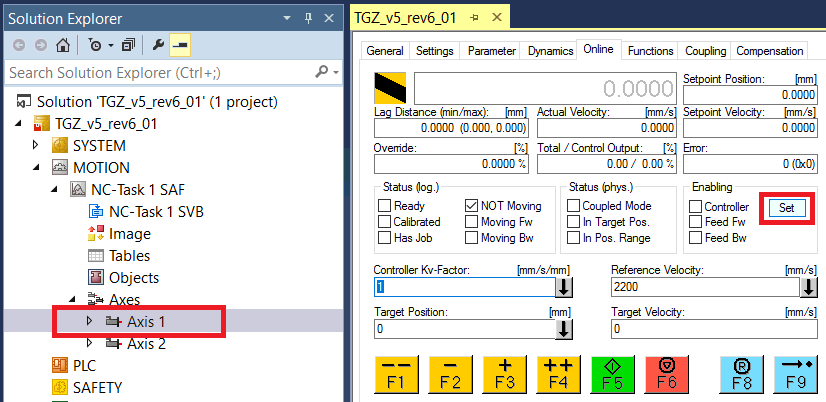
- Pomocí stromové položky
MOTION | NC-Task 1 SAF | Axes | Axis 1zobrazíte všechny vlastnosti osy. Vyberte kartu Online a klikněte na tlačítko Set.
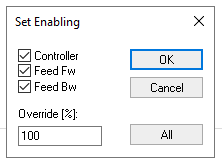
- Kliknutím na tlačítko All zaškrtnětě všechna zaškrtávací políčka.
- Osa by nyní měla být povolena a připravena k pohybu v režimu cyklického synchronního polohování (CST). V případě potřeby použijte červené tlačítko F6 pro resetování chyby a/nebo modré tlačítko F8 pro referenci osy.
- Jak je popsáno v kapitole Mapování PDO a varianty jednotky TGZ, jsou hodnoty PDO stejné pro jednoosou i dvouosou verzi TGZ. Proto při použití varianty TGZ-S v systému TwinCAT nebude osa 2 použitelná a musí být ignorována.
Nastavení režimu cyklické synchronní rychlosti (CSV)¶
-
Použijte konfigurační režimu TwinCAT
-
Aktivujte kartu Process Data jednotky TGZ a v kombinovaném poli vyberte položku Cyclic synchronous velocity mode (CSV).
- Znovu připojte data osy kliknutím na tlačítko Yes v následujícím dialogovém okně.
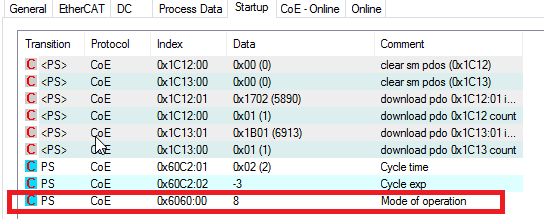
- Aktivujte kartu Startup a změňte hodnotu objektu
0x6060:00(Mode of operation). Dvakrát klikněte na tuto položku.
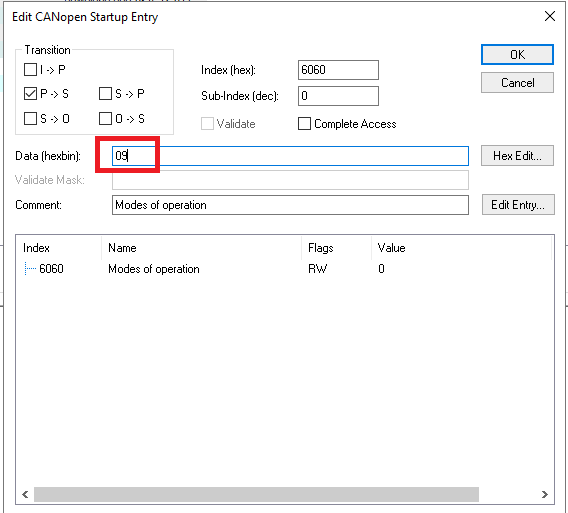
- V následujícím dialogovém okně změňte hodnotu
Datana09a klikněte na tlačítko OK.
- V případě potřeby proveďte totéž pro druhou osu (objekt
0x6860:00). - Nezapomeňte nastavit příslušný režim pohonu TGZ (registr
D-Mode), jak je popsáno v kapitole Režimy provozu 0x6060. - Aktivujte konfiguraci a přepněte do režimu Run. TwinCAT nyní používá regulátor otáček k provedení pohybu. Pro dosažení plynulého polohování je nutné správně nastavit parametry regulátoru.