Use the newest EtherCAT XML file for TGZ and copy it to the TwinCAT folder (TwinCAT\3.1\Config\Io\EtherCAT).
Create a new project\
Connect TGZ to the EtherCAT network
Set the D-Mode register of the TGZ servo amplifier to 3 (position mode).
Do this for the first or both axes (TGZ-D drive version).
Save the settings if necessary.
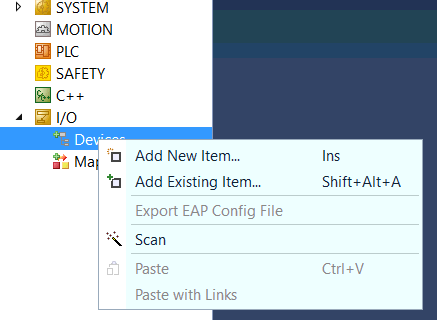
Use the Scan command in the context menu of I/O | Devices
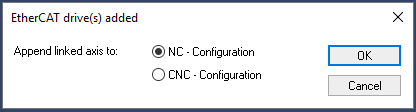
Append the drive to the NC-Configuration
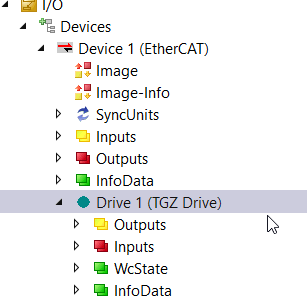
Double-click on the TGZ Drive entry in the device tree to open the properties window.
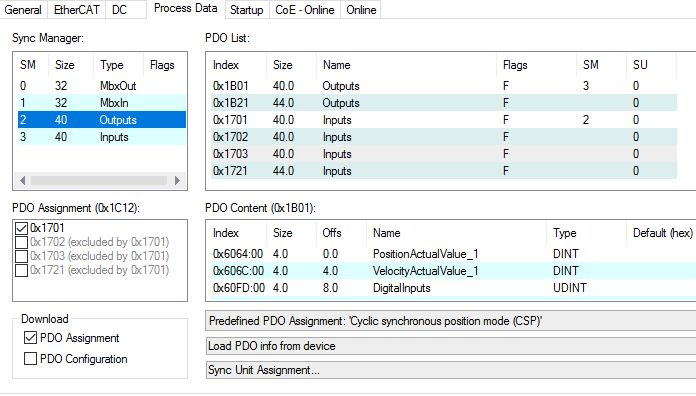
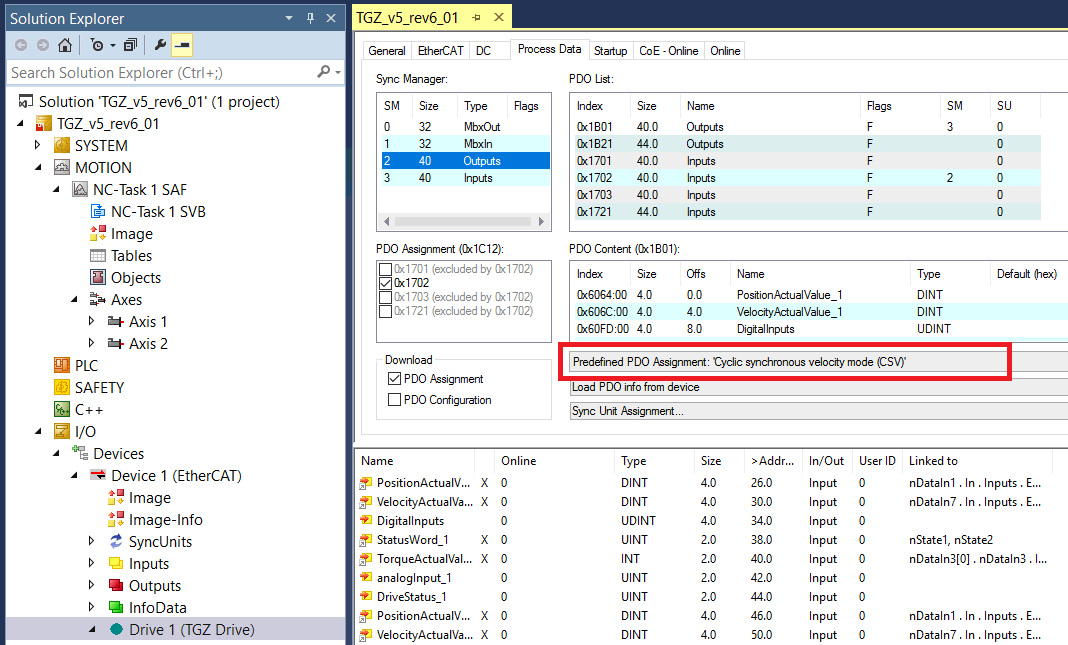
PDOs can be observed and changed in the Process Data tab. The image below displays the settings for CST mode.
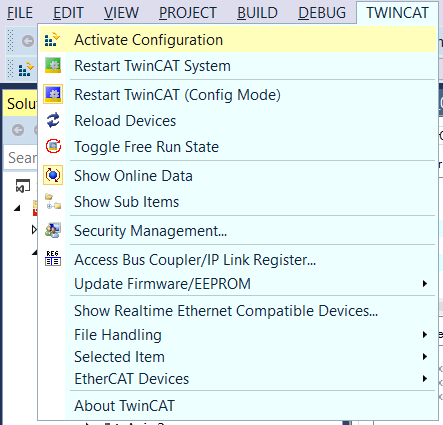
When the setup is complete, activate the configuration.
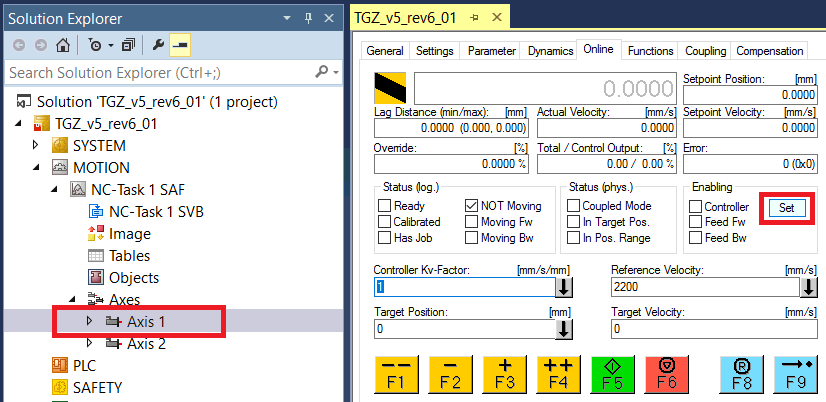
Use the tree item MOTION | NC-Task 1 SAF | Axes | Axis 1 to display all axis properties. Select the Online tab and then click on the Set button.
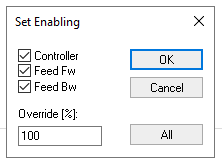
Enable all checkboxes by clicking on the All button.
The axis should now be enabled and ready for movement in cyclic synchronous positioning mode (CST). If needed, use the red F6 button to reset the error and/or the blue F8 button to reference the axis.
As described in the chapter PDO mapping and TGZ drive variants, the PDO values are the same for the single and double axis TGZ versions. Therefore, when using the TGZ-S variant in TwinCAT, Axis 2 will not be usable and must be ignored.
Activate the Process Data tab of the TGZ drive and select the Cyclic synchronous velocity mode (CSV) item in the combo box.
Reconnect the axis data by clicking Yes in the following dialog box.
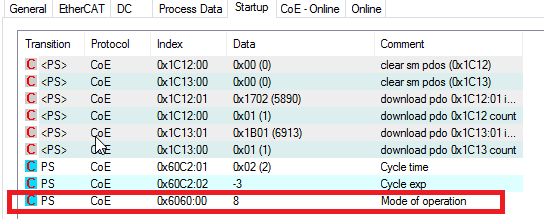
Activate the Startup tab and change the value of the object 0x6060:00 (Mode of operation). Double-click on this item.
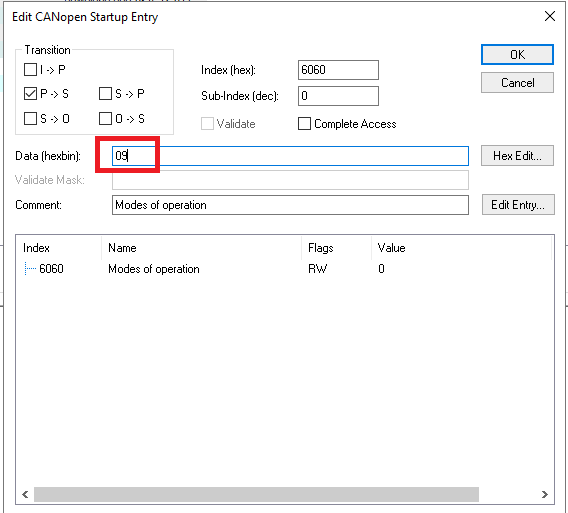
In the following dialog box, change the Data value to 09 and click OK.
If necessary, do the same for the second axis (0x6860:00).
Remember to set the appropriate TGZ drive mode (D-Mode register) as described in the chapter Modes of Operation 0x6060.
Activate the configuration and switch to Run mode.
TwinCAT will now use the speed regulator to perform motion.
Properly setting the regulator parameters is essential for achieving smooth positioning.